





I. Introduction▲
Par dûˋfaut, le langage C (par exemple la version standardisûˋe en 1999) ne dispose pas d'instructions natives permettant d'ûˋcrire directement des programmes multitûÂches. Ainsi, la bibliothû´que pthread dûˋfinie dans les normes POSIX 1003.1c et 1003.1j lui est associûˋe pour atteindre cet objectif.
Fin 2011, une nouvelle version du langage C (langage C11multitûÂche natif dans le C) a ûˋtûˋ standardisûˋe, lui permettant dûˋsormais de disposer des bibliothû´ques natives pour la programmation multitûÂche. Mais dans ce cours, nous ne nous intûˋressons pas û cette derniû´re version et considûˋrons le langage C dans sa version antûˋrieure.
Ce cours propose un double objectif : la prûˋsentation d'une panoplie de fonctions des normes POSIX 1003.1c et 1003.1j et leurs mises en application dans le contexte du traitement des diffûˋrentes problûˋmatiques liûˋes au multitûÂche : crûˋation de tûÂche, pûˋriodicitûˋ de tûÂche,
affectation d'une prioritûˋ et d'un type d'ordonnancement û une tûÂche, synchronisation entre tûÂches, communication entre tûÂches, inversion de prioritûˋ, etc.
Dans ce cours, nous considûˋrons que l'application multitûÂche est exûˋcutûˋe sur une plate-forme monoprocesseur (un seul processeur). L'exûˋcution parallû´le des tûÂches est alors virtuelle dans ce cas.
Ainsi c'est donc au systû´me d'exploitation installûˋ sur l'architecture matûˋrielle sur laquelle s'exûˋcute l'application d'utiliser ses mûˋcanismes internes pour gûˋrer l'exûˋcution des diffûˋrentes tûÂches de l'application, afin de leurs permettre de respecter leurs diffûˋrentes contraintes.
II. Installation et utilisation de Pthread▲
Il est possible d'ûˋcrire des programmes multitûÂches avec pthread aussi bien sur Windows que sur Linux. Linux par dûˋfaut dispose dûˋjû d'une bibliothû´que pthread qui lui est intûˋgrûˋe, tandis que Windows n'en dispose pas. Il est donc nûˋcessaire de l'installer sur ce dernier.
Par la suite, nous prûˋsenterons les diffûˋrentes ûˋtapes d'installation de pthread sous Windows. Puis nous prûˋsenterons ûˋgalement les diffûˋrents ûˋlûˋments nûˋcessaires pour l'exûˋcution d'un programme utilisant pthread sur Linux.
- Sous windows : La bibliothû´que pthread est tûˋlûˋchargeable icitûˋlûˋcharger pthread. Pour l'instant, toutes les fonctions dûˋfinies dans cette bibliothû´que ne sont pas encore implûˋmentûˋes, ce qui limite sa portabilitûˋ. L'ensemble des ûˋlûˋments implûˋmentûˋs et non implûˋmentûˋs de pthread sont visibles û travers le lien suivantconnaitre les fonctions implûˋmentûˋes et non implûˋmentûˋes de pthread pour windows. Sur la page de pthread, tûˋlûˋchargez le fichier exûˋcutable le plus rûˋcent, actuellement : pthreads-w32-2-8-0-release.exe. Exûˋcutez-le pour dûˋzipper son contenu dans un rûˋpertoire de votre choix. Si vous utilisez par exemple Code::Blocks (exemple de la version 12.11), voici la procûˋdure û suivre :
- rûˋpûˋrez l'emplacement du compilateur C (MinGW) dans le rûˋpertoire d'installation de Code::Blocks sous votre machine (ex: C:\Program Files\CodeBlocks\MinGW) ;
- copiez les fichiers .h situûˋs dans le rûˋpertoire ..\Pre-built.2\include du dossier oû¿ vous avez dûˋzippûˋ la librairie pthread tûˋlûˋchargûˋe prûˋcûˋdemment. Collez ces fichiers dans le rûˋpertoire C:\Program Files\CodeBlocks\MinGW\include ;
- copiez les fichiers .a et .lib situûˋs dans le rûˋpertoire ..\Pre-built.2\lib du dossier oû¿ vous avez dûˋzippûˋ la librairie pthread. Collez ces fichiers dans le rûˋpertoire C:\Program Files\CodeBlocks\MinGW\lib ;
- copiez les fichiers .dll situûˋs dans le rûˋpertoire ..\Pre-built.2\lib du dossier oû¿ vous avez dûˋzippûˋ la librairie pthread. Collez ces fichiers dans le rûˋpertoire C:\Program Files\CodeBlocks\MinGW\bin.
Sous Code::Blocks, si cela n'est dûˋjû pas automatiquement fait, ajoutez le chemin oû¿ est installûˋ MinGW sur votre machine (ex: C:\Program Files\CodeBlocks\MinGW) dans l'onglet Settings-->Compiler-->Toolchain executables-->compiler's installation directory.
Puis validez avec le bouton ok.
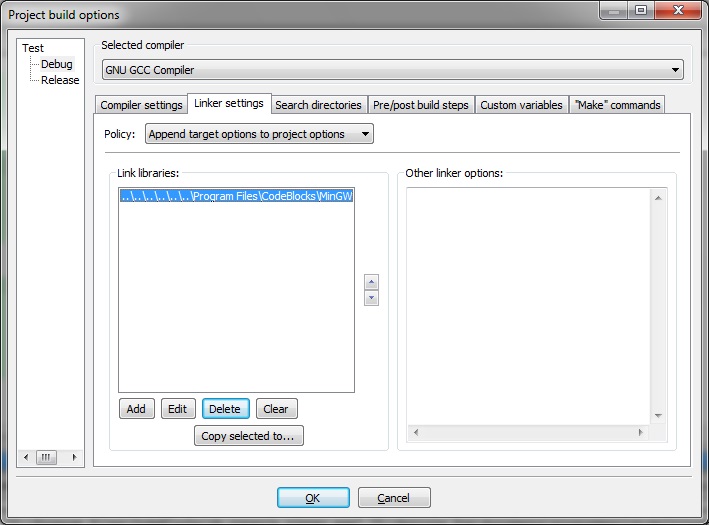
Maintenant, crûˋez un projet C sous Code::Blocks dans lequel vous allez dûˋvelopper votre application. Cliquez droit sur ce projet et choisissez le menu Build options..., puis Linker settings. Cliquez sur le bouton Add et renseignez l'emplacement qui mû´ne
au fichier libpthreadGC2.a (avec ce fichier y compris) que vous aviez manuellement mis dans le rûˋpertoire C:\Program Files\CodeBlocks\MinGW\lib. Puis, Code::Blocks vous demandera s'il enregistre cet emplacement avec un chemin relatif. Acceptez cette proposition.
|
Note : Lorsque vous exûˋcuterez votre programme en cliquant sur le bouton run de Code::Blocks, tout devrait fonctionner. Mais si vous voulez directement lancer votre programme en double cliquant sur l'exûˋcutable (le .exe) situûˋ dans le dossier projet sous votre machine, vous devrez tout d'abord ajouter manuellement le fichier pthreadGC2.dll dans ce dossier prû´s de l'exûˋcutable.
- Sous Linux : Sous le systû´me d'exploitation Linux, le compilateur C qui y est intûˋgrûˋ dispose d'ores et dûˋjû de la bibliothû´que pthread. Il ne nûˋcessite donc aucune installation. Pour ûˋcrire votre programme, crûˋez un fichier d'extension .c, avec l'ûˋditeur de texte gedit par exemple (pour de petits programmes, sinon vous pouvez installer un IDE dûˋdiûˋ). Lors de la compilation et de l'exûˋcution de votre programme (nommûˋ par exemple monprogramme.c), sous la console, placez-vous dans le rûˋpertoire oû¿ il se trouve et exûˋcutez respectivement les commandes suivantes :
- gcc -lpthread -o monprogramme monprogramme.c ô ô ô ô (pour la compilation) ;
- ./monprogramme ô ô ô ô (pour l'exûˋcution).
Lors de la compilation, l'option -lpthread indique au compilateur que le programme utilise la bibliothû´que pthread (parfois il faut mettre cette option en fin de ligne si le compilateur ne reconnaûÛt pas les primitives pthread de votre programme). L'option -o permet de gûˋnûˋrer le fichier exûˋcutable monprogramme issu du fichier source monprogramme.c.
Par la suite, nous compilerons et exûˋcuterons les programmes d'application de ce cours sur Linux, car ce systû´me est mieux adaptûˋ pour le multitûÂche que Windows.
III. Qu'est-ce qu'une tûÂche ?▲
III-A. Dûˋfinition▲
Une tûÂche est une unitûˋ active d'une application. Il s'agit d'un ensemble d'instructions sûˋquentielles correspondant souvent û une procûˋdure ou û une fonction.
Une tûÂche est l'ûˋquivalent d'un processus lûˋger dans le jargon des systû´mes d'exploitation. Contrairement û un processus lourd qui, lorsqu'il est crûˋûˋ, implique la
rûˋservation des ressources telles qu'un espace mûˋmoire, une table de fichiers ouverts et une pile interne qui lui sont toutes dûˋdiûˋes, un processus lûˋger, lorsqu'il est crûˋûˋ,
partage le mûˆme espace mûˋmoire et la mûˆme table des fichiers ouverts que son processus pû´re (son crûˋateur), mais dispose de sa propre pile. L'avantage des processus lûˋgers sur les
processus lourd est qu'ils sont trû´s favorables û la programmation multitûÂche, car la crûˋation d'une tûÂche est moins coû£teuse en termes de ressources du fait qu'elles ne sont pas toutes
dupliquûˋes. De plus, l'utilisation des tûÂches simplifie la gestion des problûˋmatiques liûˋes û l'exûˋcution concurrente (communication, synchronisation entre tûÂches...).
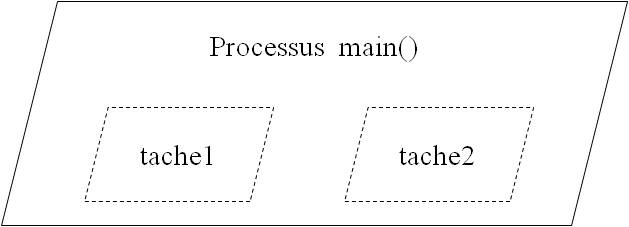
Sous Posix, l'anglicisme utilisûˋ pour dûˋnommer un processus lûˋger et donc une tûÂche est thread. Dans ce cours, nous reprûˋsenterons graphiquement une tûÂche par un parallûˋlogramme avec un
contour en trait interrompu. Un processus lourd sera reprûˋsentûˋ par un parallûˋlogramme avec un contour en trait continu.
III-B. Crûˋation de tûÂches sous Posix▲
Un programme C utilisant la bibliothû´que pthread doit disposer de l'entûˆte suivant :
#include <pthread.h>Sous Posix, la crûˋation d'une tûÂche est rûˋalisûˋe avec la fonction suivante :
int pthread_create(pthread_t *thread, pthread_attr_t *attr, void* (*start_routine)(void*), void *arg);- thread : pointeur de type pthread_t contenant l'identificateur de la tûÂche qui vient d'ûˆtre crûˋûˋe ;
- attr : variable de type pthread_attr_t. Elle correspond û une sorte de conteneur qui va permettre d'indiquer les diffûˋrentes propriûˋtûˋs de la tûÂche qui doit ûˆtre exûˋcutûˋe (son type d'ordonnancement, sa prioritûˋ, tûÂche joignable/dûˋtachable? ...). Nous dûˋvelopperons au fur et û mesure cette variable dans les prochains paragraphes ;
- start_routine : c'est la fonction C qui sera exûˋcutûˋe par la tûÂche qui est crûˋûˋe ;
- arg : pointeur correspond aux variables passûˋes en paramû´tre û la fonction start_routine. Il vaut NULL si aucun paramû´tre n'est passûˋ û la fonction ;
- Comme valeur de retour, la fonction pthread_create renvoie 0 si tout s'est bien passûˋ et un nombre nûˋgatif sinon.
III-B-1. Attendre la fin d'une tûÂche▲
Lorsqu'un processus lourd crûˋe une tûÂche sous Posix, s'il ne lui est pas explicitement indiquûˋ d'attendre la fin d'exûˋcution de cette tûÂche, alors û sa terminaison elle forcera l'arrûˆt de la tûÂche crûˋûˋe. Pour ûˋviter cela, Posix propose la fonction pthread_join. Le prototype de la fonction pthread_join est :
int pthread_join(pthread_t *thread, void** thread_return)Son premier paramû´tre thread reprûˋsente l'identificateur de la tûÂche sur laquelle le processus ou la tûÂche crûˋatrice doit attendre. Son deuxiû´me paramû´tre reprûˋsente une variable dans laquelle est stockûˋe une ûˋventuelle valeur de retour produite par la tûÂche. Ce dernier vaut NULL si la tûÂche ne renvoie aucune valeur.
III-B-2. Petit programme û 2 tûÂches▲
Considûˋrons un programme oû¿ deux tûÂches doivent ûˆtre crûˋûˋes par le processus exûˋcutant la fonction main(void) et s'exûˋcuter de maniû´re concurrente. Chacune, lorsqu'elle devient active, doit s'identifier et effectuer un nombre quelconque d'itûˋrations en l'ûˋcrivant û l'ûˋcran avant d'ûˆtre prûˋemptûˋe.
|
Le code source est le suivant :
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <pthread.h>
void* fonc(void* arg){
int i;
for(i=0;i<7;i++){
printf("Tache %d : %d\n", (int) arg, i);
usleep(1000000); //attendre 1 seconde
}
}
int main(void)
{
pthread_t tache1, tache2; //dûˋclaration des deux tûÂches
pthread_create(&tache1, NULL, fonc, (void*) 1); //crûˋation effective de la tûÂche tache1
pthread_create(&tache2, NULL, fonc, (void*) 2);
pthread_join(tache1, NULL); //la fonction principale main(void), doit attendre la fin de l'exûˋcution de la tûÂche tache1
pthread_join(tache2, NULL);
return 0;
}#$ gcc -lpthread -o executionConcurrente executionConcurrente.c
#$ ./executionConcurrente
Tache 1 : 0
Tache 2 : 0
Tache 1 : 1
Tache 2 : 1
Tache 2 : 2
Tache 1 : 2
Tache 2 : 3
Tache 1 : 3
Tache 2 : 4
Tache 1 : 4
Tache 2 : 5
Tache 1 : 5
Tache 2 : 6
Tache 1 : 6Nous remarquons lors de l'exûˋcution un ordre d'affichage arbitraire entre les tûÂches 1 et 2. Cet ordre d'affichage peut varier d'une exûˋcution û une autre.
III-B-3. Forcer la non-attente d'une tûÂche▲
Il peut arriver que dans une application multitûÂche, on n'ait pas besoin que le processus crûˋateur d'une tûÂche attende la fin d'exûˋcution de cette derniû´re avant de se
terminer. Pour cela, on force la tûÂche û ûˆtre dûˋtachûˋe de son processus pû´re. Ainsi, mûˆme si la fonction pthread_join(..) est appelûˋe dans le code source du
processus pû´re, cela sera sans effet.
Pour forcer une tûÂche û ûˆtre dûˋtachûˋe, il faut modifier la valeur de la variable de type pthread_attr_t de la tûÂche. Le bout de code suivant permet de rûˋaliser cet objectif :
pthread_attr_t attr; // dûˋclaration de la variable contenant les propriûˋtûˋs de la tûÂche
pthread_attr_init(&attr); //initialisation de attr aux valeurs par dûˋfaut. Obligatoire avant toute manipulation de attr
pthread_attr_setdetachstate(&attr, PTHREAD_CREATE_DETACHED); // affectation de la propriûˋtûˋ dûˋtachable û attr
pthread_create(&tache1, &attr, fonc, 1);
//...
pthread_attr_destroy(&attr); // dûˋtruire attr pour libûˋrer la mûˋmoire allouûˋeDes informations supplûˋmentaires û ce sujet sont trouvables iciThreads dûˋtachable et attachable.
IV. Prioritûˋ et ordonnancement de tûÂches▲
Quelques fois dans une application multitûÂche, les tûÂches doivent s'exûˋcuter selon leur importance et un ordre bien spûˋcifique de les exûˋcuter doit ûˆtre choisi : c'est la problûˋmatique d'affectation des prioritûˋs aux tûÂches et du type de leur ordonnancement. Cette partie est une problûˋmatique gûˋnûˋralement traitûˋe dans le domaine des systû´mes temps rûˋel. Pour affecter une prioritûˋ et un type d'ordonnancement û une tûÂche, il faut modifier sa propriûˋtûˋ attr de type pthread_attr_t. Pour cela, nous aurons besoin des ûˋlûˋments suivants :
1. La dûˋclaration de la structure de donnûˋes Posix utilisûˋe pour affecter une prioritûˋ û la tûÂche û crûˋer :
struct sched_param param2. La fonction qui oblige le systû´me d'exploitation û prendre en compte les diffûˋrents paramû´tres (prioritûˋ et type d'ordonnancement) que va acquûˋrir la tûÂche û crûˋer :
int pthread_attr_setinheritsched(pthread_attr_t *attr, int inheritsched)Les diffûˋrentes valeurs que peut prendre la variable inheritsched sont :
- PTHREAD_EXPLICIT_SCHED : la tûÂche û crûˋer sera forcûˋe d'utiliser les paramû´tres d'ordonnancement contenus dans sa propriûˋtûˋ attr ;
- PTHREAD_INHERIT_SCHED : la tûÂche û crûˋer hûˋritera des propriûˋtûˋs d'ordonnancement de son processus crûˋateur. Quels que soient les paramû´tres d'ordonnancement spûˋcifiûˋs dans attr, elle les ignorera si cette option est utilisûˋe.
3. La fonction qui permet d'affecter û la propriûˋtûˋ attr de la tûÂche û crûˋer, sa prioritûˋ (qui est un nombre entier) contenue dans la variable param :
int pthread_attr_setschedparam(pthread_attr_t *attr, const struct sched_param *param)4. La fonction qui permet d'affecter û la propriûˋtûˋ attr de la tûÂche û crûˋer, son type d'ordonnancement notûˋ policy :
int pthread_attr_setschedpolicy(pthread_attr_t *attr, int policy)Il existe plusieurs type d'ordonnancement correspondant sous Posix aux valeurs suivantes :
- SCHED_FIFO : il s'agit de l'ordonnancement prûˋemptif û prioritûˋs fixes. Les tûÂches de mûˆme prioritûˋ sont ordonnancûˋes en FIFO (c'est-û -dire, selon l'ordre de leurs activations).
- SCHED_RR : il s'agit de l'ordonnancement Round-Robin (c'est-û -dire, û tourniquet) û prioritûˋ prûˋemptif. Une tûÂche utilise un quantum de temps puis est dûˋplacûˋe en queue de la file d'attente du niveau de sa prioritûˋ.
- SCHED_OTHER : il s'agit d'un ordonnancement û temps partagûˋ entre tûÂches. Il pointe gûˋnûˋralement sur SCHED_FIFO.
5. La fonction permettant d'affecter les paramû´tres d'ordonnancement û une tûÂche en cours d'exûˋcution. Elle est utilisûˋe pour affecter les paramû´tres d'ordonnancement du processus pû´re qui crûˋe toutes les autres tûÂches, ou directement dans le corps de la tûÂche :
int pthread_setschedparam(pthread_t thread, int policy, const struct sched_param *param)Le code source suivant prûˋsente le petit programme û deux tûÂches prûˋcûˋdent avec prise en compte des paramû´tres d'ordonnancement (prioritûˋ et type d'ordonnancement).
#include <stdio.h>
#include <stdlib.h>
#include <pthread.h>
void* fonc(void* arg){
int i;
for(i=0;i<7;i++){
printf("Tache %d : %d\n", (int) arg, i);
usleep(1000000);
}
}
int main(void)
{
pthread_t tache1, tache2;
pthread_attr_t attr;
struct sched_param param;
pthread_attr_init(&attr);
param.sched_priority = 12;
pthread_setschedparam(pthread_self(), SCHED_FIFO, ¶m); //pthread_self() pointe sur le processus en cours d'exûˋcution, û l'occurrence la fonction main()
//le processus main() sera ordonnancûˋ en SHED_FIFO avec une prioritûˋ de 12
pthread_attr_setinheritsched(&attr, PTHREAD_EXPLICIT_SCHED);
pthread_attr_setschedpolicy(&attr, SCHED_FIFO);
param.sched_priority = 10;
pthread_attr_setschedparam(&attr, ¶m);
pthread_create(&tache1, &attr, fonc, 1); // la tûÂche tache1 crûˋûˋe, sera ordonnancûˋe en SHED_FIFO avec une prioritûˋ de 10
param.sched_priority = 7;
pthread_attr_setschedparam(&attr, ¶m);
pthread_create(&tache2, &attr, fonc, 2); // la tûÂche tache2 crûˋûˋe, sera ordonnancûˋe en SHED_FIFO avec une prioritûˋ de 7
pthread_attr_destroy(&attr);
pthread_join(tache1, NULL);
pthread_join(tache2, NULL);
return 0;
}Un programme sur Linux utilisant des primitives temps rûˋel tels que des paramû´tres d'ordonnancement (prioritûˋs, politiques d'ordonnancement...), doit ûˆtre exûˋcutûˋ en mode root avec le mot clûˋ sudo. La sortie du programme prûˋcûˋdent est la suivante :
#$ gcc -lpthread -o monprog monprog.c
#$ sudo ./monprog
[sudo] password for georges: .......
Tache 1 : 0
Tache 2 : 0
Tache 2 : 1
Tache 1 : 1
Tache 1 : 2
Tache 2 : 2
Tache 1 : 3
Tache 2 : 3
Tache 1 : 4
Tache 2 : 4
Tache 1 : 5
Tache 2 : 5
Tache 1 : 6
Tache 2 : 6V. Gûˋrer le partage de donnûˋes entre tûÂches ▲
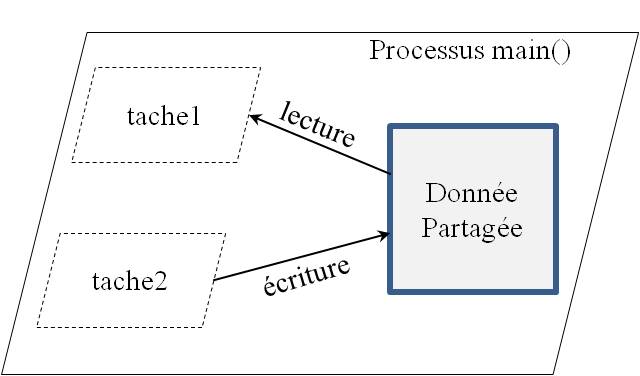
Plusieurs tûÂches lorsqu'elles s'exûˋcutent peuvent accûˋder û une donnûˋe partagûˋe qui leur est commune (voir la figure) pour rûˋaliser leurs besoins. Il s'agit du problû´me de la communication asynchrone entre tûÂches. Le terme asynchrone signifie que les instants d'accû´s û la donnûˋe partagûˋe par les tûÂches ne sont pas connus a priori.
|
L'une d'entre elles (la tûÂche 2) peut par exemple ûˋcrire sur la donnûˋe partagûˋe pendant que l'autre (la tûÂche 1) est chargûˋe de la lire. Pour gûˋrer le problû´me
de la cohûˋrence de la donnûˋe partagûˋe (c'est-û -dire ûˋviter qu'elle soit corrompue au travers des accû´s alûˋatoires), il faut ûˋviter par exemple qu'une tûÂche lise la donnûˋe pendant qu'elle est entrain d'ûˆtre modifiûˋe, ou qu'une tûÂche modifie
la donnûˋe pendant qu'elle est entrain d'ûˆtre lue. Pour rûˋsoudre ce problû´me, des mûˋcanismes d'exclusion mutuelle doivent dont ûˆtre mis sur pied pour protûˋger la donnûˋe partagûˋe. Nous allons montrer comment cela peut ûˆtre fait
sous Posix.
V-A. Exclusion mutuelle▲
L'exclusion mutuelle est le mûˋcanisme qui permet qu'une et une seule tûÂche accû´de û une ressource partagûˋe û la fois û un instant donnûˋ.
Pour cela, on utilise une variable spûˋciale appelûˋe sûˋmaphore d'exclusion mutuelle qui joue le rûÇle de verrou pour accûˋder û la ressource. Sous Posix, elle est mise en place via les quatre ûˋlûˋments suivants :
1. La dûˋclaration de votre donnûˋe/ressource partagûˋe. Elle peut ûˆtre de tout type dans le langage C ;
2. La dûˋclaration du mutex. C'est le verrou qui va gûˋrer l'accû´s û la donnûˋe partagûˋe. Elle fera en sorte qu'une seule tûÂche accû´de û la donnûˋe û la fois :
pthread_mutex_t verrou3. La fonction permettant d'initialiser le verrou. Obligatoire avant toute utilisation de ce verrou.
pthread_mutex_init(pthread_mutex_t *verrou, const pthread_mutextattr_t *m_attr)4. La fonction permettant û une tûÂche de prendre le verrou :
pthread_mutex_lock(pthread_mutex_t *verrou)5. La fonction permettant û une tûÂche de libûˋrer le verrou aprû´s avoir utilisûˋ la donnûˋe partagûˋe :
pthread_mutex_unlock(pthread_mutex_t *verrou)Le code source qui suit prûˋsente l'implûˋmentation de l'exemple prûˋcûˋdent û deux tûÂches, qui doivent se partager une donnûˋe de type enregistrement, l'une chargûˋe de la lire et l'autre chargûˋe de la modifier.
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <pthread.h>
typedef struct { // dûˋclaration du type de la donnûˋe partagûˋe
float taille;
float poids;
} type_donneePartagee;
pthread_mutex_t verrou; //dûˋclaration du verrou
type_donneePartagee donneePartagee; //dûˋclaration de la donnûˋe partagûˋe
void* tache1(void *arg){ // dûˋclaration du corps de la tûÂche qui lit la donnûˋe partagûˋe. On considû´re qu'elle s'exûˋcute indûˋfiniment
type_donneePartagee ma_donneePartagee;
int i=0;
while(i<10){
pthread_mutex_lock(&verrou);
ma_donneePartagee = donneePartagee;
pthread_mutex_unlock(&verrou);
printf("La tache %s vient de lire la donnee partagee\n", (char*) arg);
//utilisation de ma_donneePartagee
usleep(1000000);
i++;
}
}
void* tache2(void *arg){ // dûˋclaration du corps de la tûÂche qui modifie la donnûˋe partagûˋe. On considû´re qu'elle s'exûˋcute indûˋfiniment
int i=0;
while(i<10){
pthread_mutex_lock(&verrou);
donneePartagee.taille = 100 + rand()%101; //choisir une taille au hasard entre 100 et 200cm. // Dans un programme rûˋel, les donnûˋes û modifier peuvent provenir de capteurs et nûˋcessitent un code un peu plus complexe
donneePartagee.poids = 10 + rand()%101;
pthread_mutex_unlock(&verrou);
printf("La tache %s vient de modifier la donnee partagee\n", (char*) arg);
usleep(1000000);
i++;
}
}
int main(void)
{
srand(200);
pthread_t th1, th2;
pthread_mutex_init(&verrou, NULL);
//initialisation de la donnûˋe partagûˋe
donneePartagee.taille = 100 + rand()%101;
donneePartagee.poids = 10 + rand()%101;
pthread_create(&th1, NULL, tache1, "1");
pthread_create(&th2, NULL, tache2, "2");
pthread_join(th1, NULL);
pthread_join(th2, NULL);
return 0;
}#$ gcc -lpthread -o partageDonnee partageDonnee.c
#$ ./partageDonnee
La tache 1 vient de lire la donnee partagee
La tache 2 vient de modifier la donnee partagee
La tache 1 vient de lire la donnee partagee
La tache 2 vient de modifier la donnee partagee
La tache 2 vient de modifier la donnee partagee
La tache 1 vient de lire la donnee partagee
La tache 1 vient de lire la donnee partagee
La tache 2 vient de modifier la donnee partagee
La tache 2 vient de modifier la donnee partagee
La tache 1 vient de lire la donnee partagee
La tache 1 vient de lire la donnee partagee
La tache 2 vient de modifier la donnee partagee
La tache 2 vient de modifier la donnee partagee
La tache 1 vient de lire la donnee partagee
La tache 1 vient de lire la donnee partagee
La tache 2 vient de modifier la donnee partagee
La tache 1 vient de lire la donnee partagee
La tache 2 vient de modifier la donnee partagee
La tache 1 vient de lire la donnee partagee
La tache 2 vient de modifier la donnee partageeV-B. Exclusion mutuelle et variable condition▲
Il peut arriver qu'une condition soit placûˋe sur une donnûˋe partagûˋe par plusieurs tûÂches. Ainsi, suivant les besoins, une tûÂche accûˋdant û la donnûˋe peut ûˆtre endormie si la condition n'est pas vûˋrifiûˋe. Elle ne sera rûˋveillûˋe que lorsqu'une autre tûÂche accûˋdera û cette donnûˋe et rendra
la condition vraie.
Pour notre exemple prûˋcûˋdent, on peut considûˋrer que la tûÂche 2 ne lit la donnûˋe partagûˋe que si la taille et le poids ûˋcrits par la tûÂche 1 sont respectivement supûˋrieurs û 120cm et 60kg. Pour ce faire, une variable condition
doit ûˆtre associûˋe au sûˋmaphore d'exclusion mutuelle pour rûˋpondre au problû´me. Les principaux ûˋlûˋments û connaûÛtre sur les variables conditions sont les suivants :
1. La dûˋclaration et l'initialisation de la variable condition :
pthread_cond_t cond = PTHREAD_COND_INITIALIZER;2. La fonction permettant d'endormir une tûÂche (possûˋdant le verrou sur la donnûˋe partagûˋe) si la condition cond est fausse :
int pthread_cond_wait(pthread_cond_t *cond, pthread_mutex_t *verrou)3. La fonction permettant de rendre la condition cond vraie. Cela envoie un signal de rûˋveil aux tûÂches qui ont ûˋtûˋ endormies sur cette condition :
int pthread_cond_signal(pthread_cond_t *cond)Si plusieurs tûÂches attendent sur une condition, l'utilisation de pthread_cond_signal(pthread_cond_t *cond) ne rûˋveille que l'une d'entre elles. Les autres restent malheureusement endormies. Pour rûˋveiller toutes les tûÂches, on utilise la fonction suivante :
int pthread_cond_broadcast(pthread_cond_t *cond)Le code ci-dessous reprend l'exemple du paragraphe V-A prûˋcûˋdent, en intûˋgrant une variable condition. La tûÂche 1 ne peut lire qu'un poids et une taille supûˋrieurs respectivement û 60kg et 120cm, sinon, elle s'endort.
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <pthread.h>
typedef struct { //dûˋclaration du type de la donnûˋe partagûˋe
float taille;
float poids;
} type_donneePartagee;
pthread_mutex_t verrou; //dûˋclaration du verrou
pthread_cond_t cond = PTHREAD_COND_INITIALIZER; //initialisation de la variable condition
type_donneePartagee donneePartagee; //dûˋclaration de la donnûˋe partagûˋe
void* tache1(void *arg){ // dûˋclaration du corps de la tûÂche qui lit la donnûˋe partagûˋe. On considû´re qu'elle s'exûˋcute indûˋfiniment
type_donneePartagee ma_donneePartagee;
int i=0;
while(i<10){
pthread_mutex_lock(&verrou);
pthread_cond_wait(&cond, &verrou);
ma_donneePartagee = donneePartagee;
pthread_mutex_unlock(&verrou);
printf("La tache %s vient de lire la donnee partagee\n", (char*) arg);
//utilisation de ma_donneePartagee
usleep(1000000);
i++;
}
}
void* tache2(void *arg){ // dûˋclaration du corps de la tûÂche qui modifie la donnûˋe partagûˋe. On considû´re qu'elle s'exûˋcute indûˋfiniment
int i=0;
while(i<10){
pthread_mutex_lock(&verrou);
donneePartagee.taille = 100 + rand()%101; //choisir une taille au hasard entre 100 et 200cm. // Dans un programme rûˋel, les donnûˋes û modifier peuvent provenir de capteurs et nûˋcessitent un code un peu plus complexe
donneePartagee.poids = 10 + rand()%101;
if(donneePartagee.taille >= 120 && donneePartagee.poids >= 60){
pthread_cond_signal(&cond);
}
pthread_mutex_unlock(&verrou);
printf("La tache %s vient de modifier la donnee partagee\n", (char*) arg);
usleep(1000000);
i++;
}
}
int main(void)
{
srand(200);
pthread_t th1, th2;
pthread_mutex_init(&verrou, NULL);
//initialisation de la donnûˋe partagûˋe
donneePartagee.taille = 100 + rand()%101;
donneePartagee.poids = 10 + rand()%101;
pthread_create(&th1, NULL, tache1, "1");
pthread_create(&th2, NULL, tache2, "2");
pthread_join(th1, NULL);
pthread_join(th2, NULL);
return 0;
}#$ gcc -lpthread -o partageDonnee partageDonnee.c
#$ ./partageDonnee
La tache 2 vient de modifier la donnee partagee
La tache 1 vient de lire la donnee partagee
La tache 2 vient de modifier la donnee partagee
La tache 2 vient de modifier la donnee partagee
La tache 2 vient de modifier la donnee partagee
La tache 2 vient de modifier la donnee partagee
La tache 1 vient de lire la donnee partagee
La tache 2 vient de modifier la donnee partagee
La tache 2 vient de modifier la donnee partagee
La tache 1 vient de lire la donnee partagee
La tache 2 vient de modifier la donnee partagee
La tache 1 vient de lire la donnee partagee
La tache 2 vient de modifier la donnee partagee
La tache 2 vient de modifier la donnee partageeVI. Le problû´me d'inversion de prioritûˋ▲
VI-A. Description du problû´me▲
L'inversion de prioritûˋ est le problû´me qui exprime le fait qu'une tûÂche empûˆche l'exûˋcution d'une autre tûÂche de prioritûˋ supûˋrieure û elle. Elle est gûˋnûˋralement une consûˋquence du problû´me de partage de donnûˋe entre tûÂches prûˋsentûˋ dans le paragraphe V prûˋcûˋdent.
Cette partie est une problûˋmatique gûˋnûˋralement traitûˋe dans le domaine des systû´mes temps rûˋel. Pour mieux illustrer ce problû´me considûˋrons le scûˋnario suivant :
Soient trois tûÂches th1, th2, th3 et un mutex notûˋ verrou. Supposons que ces tûÂches sont telles que prioritûˋ(th3) > prioritûˋ(th2) > prioritûˋ(th1). Initialement, les tûÂches th3 et th2 sont endormies.
La tûÂche th1 commence son exûˋcution en premier et s'empare du mutex verrou. Puis, la tûÂche th3 plus prioritaire se rûˋveille et prûˋempte th1, s'exûˋcute et cherche ensuite û prendre le mutex verrou. Mais elle se
bloque et s'endort û nouveau, car th1 a dûˋjû pris le verrou. Suite û cela, la tûÂche th1 se rûˋveille et continue son exûˋcution. Peu aprû´s, la tûÂche th2 (qui n'utilise jamais le verrou) plus prioritaire que th1, se rûˋveille aussi et prûˋempte th1. Le rûˋsultat est dont le suivant :
- la tûÂche th2 s'exûˋcute ;
- la tûÂche th1 est prûˋemptûˋe, mais dûˋtient le mutex verrou ;
- la tûÂche th3 est bloquûˋe et endormie en attente du mutex verrou.
Le fait que la tûÂche th3 est bloquûˋe alors que la tûÂche th2 (moins prioritaire qu'elle) est entrain de s'exûˋcuter, s'appelle le problû´me d'inversion de prioritûˋ.
VI-B. Rûˋsolution du problû´me▲
Pour rûˋsoudre le problû´me de l'inversion de prioritûˋ, une prioritûˋ correspondant û celle de la tûÂche la plus prioritaire (th3) doit ûˆtre affectûˋe au mutex verrou. Il faut ûˋgalement associer aux tûÂches un protocole û hûˋritage de la prioritûˋ du verrou.
Ainsi, le scûˋnario suivant sera celui qui ûˋvite l'inversion de prioritûˋ :
- La tûÂche th1 commence son exûˋcution, s'empare du verrou et hûˋrite de la prioritûˋ de ce dernier ;
- La tûÂche th3 se rûˋveille, prûˋempte th1 (qui a hûˋritûˋ d'une prioritûˋ ûˋgale û la sienne) et commence son exûˋcution, mais se bloque et se rendort sur le verrou dûˋjû pris par th1 ;
- La tûÂche th1 reprend la main et continue son exûˋcution dans sa section critique ;
- La tûÂche th2 se rûˋveille û son tour mais ne peut dûˋbuter son exûˋcution, car la tûÂche th1 en cours d'exûˋcution est la plus prioritaire (th1 a hûˋritûˋ de la prioritûˋ du verrou qui est celle de la tûÂche la plus prioritaire du systû´me) ;
- Lorsque th1 libû´re le verrou, elle perd la prioritûˋ de ce verrou et reprend sa prioritûˋ initiale (la moins prioritaire dans notre exemple) ;
- La tûÂche th2 dûˋjû prûˆte ne peut pas s'exûˋcuter, car la tûÂche th3 qui ûˋtait bloquûˋe sur le verrou est plus prioritaire qu'elle. C'est dont th3 qui prend la main et finit son exûˋcution ;
- Finalement, th2 s'exûˋcute et se termine. Si th1 n'avait pas fini son exûˋcution en libûˋrant le verrou, elle reprend la main et se termine aussi.
En plus des fonctions dûˋjû prûˋsentûˋes dans les paragraphes IV et V, voici les ûˋlûˋments û connaûÛtre pour rûˋsoudre ce problû´me :
1. La dûˋclaration de la propriûˋtûˋ û affecter au mutex d'exclusion mutuelle (le verrou) :
pthread_mutexattr_t m_attr;2. La fonction d'initialisation de la propriûˋtûˋ du mutex. Obligatoire avant toute manipulation de l'attribut du mutex :
int pthread_mutexattr_init(pthread_mutexattr_t *m_attr)3. La fonction permettant û un mutex d'ûˆtre partagûˋ par les tûÂches appartenant û n'importe quel processus. Pour cela, la variable pshared doit ûˆtre ûˋgale û PTHREAD_PROCESS_SHARED. Si le partage est interne au processus/tûÂche crûˋateur du mutex, alors pshared doit prendre la valeur PTHREAD_PROCESS_PRIVATE :
int pthread_mutexattr_setpshared(pthread_mutexattr_t *m_attr, int pshared)4. La fonction permettant de mettre dans la propriûˋtûˋ m_attr qui sera affectûˋe au mutex, sa prioritûˋ plafond prioceiling :
int pthread_mutexattr_setprioceiling(pthread_mutexattr_t *m_attr, int prioceiling)5. La fonction permettant de mettre dans la propriûˋtûˋ m_attr qui sera affectûˋe au mutex, son protocole d'hûˋritage protocol. Dans notre cas, puisque toute tûÂche s'emparant du mutex doit hûˋriter de sa prioritûˋ, protocol vaudra PTHREAD_PRIO_PROTECT. Il existe aussi d'autres valeurs pour la variable protocol que sont PTHREAD_PRIO_NONE et PTHREAD_PRIO_INHERIT :
int pthread_mutexattr_setprotocol(pthread_mutexattr_t *m_attr, int protocol)6. La fonction permettant û une tûÂche disposant de la prorpiûˋtûˋ attr d'hûˋriter d'une prioritûˋ. Pour ce faire, la variable scope vaudra PTHREAD_SCOPE_SYSTEM, si la tûÂche est en concurrence avec toute autre tûÂche de tout processus du systû´me. La variable scope vaudra cependant PTHREAD_SCOPE_PROCESS, si la tûÂche est uniquement en compûˋtition avec les tûÂches internes au mûˆme processus :
int pthread_attr_setscope(pthread_attr_t *attr, int scope)Le code source ci-dessous prûˋsente l'implûˋmentation du scûˋnario de rûˋsolution du problû´me de l'inversion de prioritûˋ pour les trois tûÂches prûˋcûˋdentes.
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <pthread.h>
#define N 4 //dûˋclaration d'une constante û utiliser dans la boucle des tûÂches
typedef struct { // dûˋclaration du type de la donnûˋe partagûˋe
float taille;
float poids;
} type_donneePartagee;
pthread_mutex_t verrou; //dûˋclaration du verrou
type_donneePartagee donneePartagee; //dûˋclaration de la donnûˋe partagûˋe
void* tache1(void *arg){ // dûˋclaration du corps de la tûÂche 1
type_donneePartagee ma_donneePartagee;
int i = 0;
while(i < N){
pthread_mutex_lock(&verrou);
ma_donneePartagee = donneePartagee;
//suite du code avec l'utilisation de la donnûˋe partagûˋe lue
pthread_mutex_unlock(&verrou);
printf("La tache %s a lu la donnûˋe partagûˋe\n", (char*) arg);
//reste du code
i++;
}
}
void* tache2(void *arg){ // dûˋclaration du corps de la tûÂche 2
int i = 0;
while(i < N){
usleep(5000000); //attendre 5 secondes
printf("La tache %s s'execute\n", (char*) arg);
//reste du code sans utilisation du mutex
i++;
}
}
void* tache3(void *arg){ // dûˋclaration du corps de la tûÂche 3
int i = 0;
for(i = 0; i < N; i++){
usleep(3000000); //attendre 3 secondes
pthread_mutex_lock(&verrou);
donneePartagee.taille = 100 + rand()%101;
donneePartagee.poids = 10 + rand()%101;
pthread_mutex_unlock(&verrou);
printf("La tache %s a ûˋcrit sur la donnûˋe partagûˋe\n", (char*) arg);
//reste du code
}
}
int main(void)
{
srand(200);
pthread_t th1, th2, th3;
pthread_attr_t attr;
pthread_mutexattr_t m_attr;
struct sched_param param;
/*prûˋparation de la propriûˋtûˋ du verrou*/
pthread_mutexattr_init(&m_attr);
pthread_mutexattr_setpshared(&m_attr, PTHREAD_PROCESS_SHARED);
pthread_mutexattr_setprioceiling(&m_attr, 15); //le mutex dispose d'une prioritûˋ de 15, qui sera celle de la tûÂche la plus prioritaire
pthread_mutexattr_setprotocol(&m_attr, PTHREAD_PRIO_PROTECT);
pthread_mutex_init(&verrou, &m_attr);
/*initialisation de la donnûˋe partagûˋe*/
donneePartagee.taille = 100 + rand()%101;
donneePartagee.poids = 10 + rand()%101;
/*prûˋparation de la propriûˋtûˋ des tûÂches*/
pthread_attr_init(&attr);
pthread_attr_setinheritsched(&attr, PTHREAD_EXPLICIT_SCHED);
pthread_attr_setscope(&attr, PTHREAD_SCOPE_SYSTEM);
pthread_attr_setschedpolicy(&attr, SCHED_FIFO);
param.sched_priority = 15;
pthread_attr_setschedparam(&attr, ¶m);
pthread_create(&th3, &attr, tache3, "tache3"); //crûˋation tûÂche 3
param.sched_priority = 12;
pthread_attr_setschedparam(&attr, ¶m);
pthread_create(&th2, &attr, tache2, "tache2"); //crûˋation tûÂche 2
param.sched_priority = 9;
pthread_attr_setschedparam(&attr, ¶m);
pthread_create(&th1, &attr, tache1, "tache1"); //crûˋation tûÂche1
pthread_mutexattr_destroy(&m_attr);
pthread_attr_destroy(&attr);
pthread_join(th1, NULL);
pthread_join(th2, NULL);
pthread_join(th3, NULL);
return 0;
}La sortie du programme est donnûˋe ci-dessous. Notons que puisque des primitives d'ordonnancement sont utilisûˋes, il faut se mettre en mode root pour exûˋcuter le programme.
#$ gcc -lpthread -o inversionPriorite inversionPriorite.c
#$ sudo ./inversionPriorite
[sudo] password for georges: .......
La tache tache1 a lu la donnûˋe partagûˋe
La tache tache1 a lu la donnûˋe partagûˋe
La tache tache1 a lu la donnûˋe partagûˋe
La tache tache1 a lu la donnûˋe partagûˋe
La tache tache3 a ûˋcrit sur la donnûˋe partagûˋe
La tache tache2 s'execute
La tache tache3 a ûˋcrit sur la donnûˋe partagûˋe
La tache tache3 a ûˋcrit sur la donnûˋe partagûˋe
La tache tache2 s'execute
La tache tache3 a ûˋcrit sur la donnûˋe partagûˋe
La tache tache2 s'execute
La tache tache2 s'executeVII. Gûˋrer la pûˋriodicitûˋ d'une tûÂche▲
Dans une application multitûÂche, certaines tûÂches peuvent s'exûˋcuter de maniû´re pûˋriodiques. C'est-û -dire qu'une tûÂche th1 disposant d'une pûˋriode de p unitûˋs de temps doit toujours dûˋbuter une nouvelle exûˋcution aprû´s l'ûˋcoulement de ce temps. Dans certaines applications, cette pûˋriodicitûˋ doit ûˆtre trû´s stricte et rigoureuse. Dans ce cas, l'application doit s'exûˋcuter en utilisant directement le temps fourni par l'horloge systû´me.
Il est donc intûˋressant de voir comment cela peut ûˆtre traitûˋ sous Posix. Dans les exemples prûˋcûˋdents, vous avez pu remarquer que la fonction usleep(int p) a ûˋtûˋ utilisûˋe pour faire attendre une
tûÂche pendant une pûˋriode p. Mais pour des raisons de dûˋrive d'horloge que nous ne dûˋtaillons pas ici, cette technique n'est pas rigoureuse dans la gestion de la pûˋriodicitûˋ de la tûÂche. Dans cette partie, sans tenir compte des solutions propriûˋtaires Posix non gûˋnûˋralement portables, nous prûˋsentons une technique permettant de gûˋrer
la pûˋriodicitûˋ stricte des tûÂches. Les ûˋlûˋments suivants sont û connaûÛtre :
1. La dûˋclaration de la structure de donnûˋes de gestion du temps (elle fait appel û la dûˋclaration de la bibliothû´que time.h) :
struct timespec time;2. La fonction permettant de rûˋcupûˋrer le temps de l'horloge du systû´me :
int clock_gettime(clockid_t clk_id, struct timespec *time)
La variable clk_id peut prendre les diffûˋrentes valeurs suivantes : CLOCK_REALTIME, CLOCK_MONOTONIC, CLOCK_PROCESS_CPUTIME_ID, CLOCK_THREAD_CPUTIME_ID. Attention, plusieurs de ces primitives ne fonctionnent pas sous Windows.
3. Les fonctions de manipulation de mutex et de variable condition que nous avons prûˋsentûˋ dans le paragraphe V, plus la fonction suivante :
int pthread_cond_timedwait(pthread_cond_t *cond, pthread_mutex_t *verrou, struct timespec *time)Cette fonction utilise un dûˋcompteur (timeout) sur le temps time pour rûˋveiller la tûÂche endormie sur l'attente de la variable condition cond qui ne sera jamais signalûˋe.
Le code ci-dessous prûˋsente un exemple illustrant la mise en place d'une tûÂche pûˋriodique.
#include <stdio.h>
#include <stdlib.h>
#include <pthread.h>
#include <time.h>
void* tachePeridique(void* periode){
pthread_cond_t cond;
pthread_mutex_t verrou;
struct timespec time;
pthread_cond_init(&cond, NULL);
pthread_mutex_init(&verrou, NULL);
int i=0;
clock_gettime(CLOCK_REALTIME, &time);
while(i<10){
pthread_mutex_lock(&verrou);
time.tv_sec = time.tv_sec + (int) periode;
printf("La tache %s s'execute periodiquement û l'instant %d secondes\n", "t1", (int) time.tv_sec);
//suite du code
pthread_cond_timedwait(&cond, &verrou, &time);
pthread_mutex_unlock(&verrou);
i++;
}
}
int main(void)
{
pthread_t tache1;
pthread_create(&tache1, NULL, tachePeridique, (void*) 5); //la tache1 est pûˋriodique de periode 5s
pthread_join(tache1, NULL);
return 0;
}#$ gcc -lpthread -o tachePeriodique tachePeriodique.c
#$ sudo ./tachePeriodique
[sudo] password for georges: .......
La tache t1 s'execute periodiquement û l'instant 1389203510 secondes
La tache t1 s'execute periodiquement û l'instant 1389203515 secondes
La tache t1 s'execute periodiquement û l'instant 1389203520 secondes
La tache t1 s'execute periodiquement û l'instant 1389203525 secondes
La tache t1 s'execute periodiquement û l'instant 1389203530 secondes
La tache t1 s'execute periodiquement û l'instant 1389203535 secondes
La tache t1 s'execute periodiquement û l'instant 1389203540 secondes
La tache t1 s'execute periodiquement û l'instant 1389203545 secondes
La tache t1 s'execute periodiquement û l'instant 1389203550 secondes
La tache t1 s'execute periodiquement û l'instant 1389203555 secondesL'on remarque une activation stricte de la tûÂche toutes les 5 secondes : la diffûˋrence en valeur absolue entre deux instants consûˋcutifs d'activation est ûˋgale û 5.
VIII. Gûˋrer la synchronisation entre tûÂches▲
Dans une application multitûÂche, il peut arriver que des tûÂches soient soumises û des contraintes de prûˋcûˋdence. C'est-û -dire qu'une ou plusieurs tûÂches s'active(nt) aprû´s qu'une autre ait terminûˋ son exûˋcution.
Pour rûˋsoudre un tel problû´me, il faut mettre sur pied un mûˋcanisme de synchronisation sur ûˋvûˋnement (voir figure). Le scûˋnario d'un tel mûˋcanisme est simple : la tûÂche 2 au dûˋbut de son exûˋcution est bloquûˋe
sur l'attente d'un ûˋvûˋnement qui lui permettra de continuer son exûˋcution. Pendant ce temps, la tûÂche 1 s'exûˋcute et û la fin de son exûˋcution, elle ûˋmet l'ûˋvûˋnement attendu par la tûÂche 2 afin que cette derniû´re dûˋbute enfin son exûˋcution.
Nous montrons comment ce problû´me peut ûˆtre traitûˋ sous Posix avec les sûˋmaphores û compte.

|
VIII-A. Les sûˋmaphores û compte▲
Le sûˋmaphore û compte est la variable utilisûˋe pour gûˋrer la synchronisation sur ûˋvûˋnement entre deux tûÂches. Mais, elle n'est malheureusement pas dûˋfinie dans les normes Posix 1003.1c et 1003.1j, mais plutûÇt dans la 1003.1b. Cela dit, pour pouvoir l'utiliser, il faut rajouter dans l'entûˆte de votre programme la bibliothû´que suivante :
#include <semaphore.h>;
Puis, les principaux ûˋlûˋments û connaûÛtre sont les suivants :
1. La dûˋclaration du sûˋmaphore û compte reprûˋsentant ainsi l'ûˋvûˋnement û manipuler :
sem_t evt;2. La fonction qui oblige une tûÂche û attendre sur l'ûˋvûˋnement evt :
int sem_wait(sem_t *evt)3. La fonction permettant û une tûÂche de signaler l'ûˋvûˋnement evt :
int sem_post(sem_t *evt)4. La fonction permettant d'initialiser le sûˋmaphore û compte. Initialement, ce sûˋmaphore est fait pour gûˋrer la synchronisation entre processus lourd. Mais, on peut le restreindre û gûˋrer uniquement la synchronisation entre les tûÂches du processus courant (dans notre cas, le processus issu de la fonction main(void)), en fixant la variable pshared û 0. Ce sûˋmaphore est partagûˋ entre plusieurs processus si la variable pshared est diffûˋrente de 0. La variable valeur reprûˋsente le compteur associûˋ au sûˋmaphore evt. C'est-û -dire le nombre maximum d'ûˋvûˋnements que la tûÂche 2 reûÏoit de la tûÂche 1 û un moment donnûˋ. Elle se doit alors de tous les considûˋrer :
int sem_init(sem_t *evt, int pshared, unsigned int valeur)5. La fonction permettant de dûˋtruire un sûˋmaphore. Une fois cette fonction appelûˋe, aucune tûÂche ne doit plus ûˆtre bloquûˋe sur ce dernier :
int sem_destroy(sem_t *evt)Le code source ci-dessous prûˋsente un bref exemple de synchronisation entre les deux tûÂches prûˋsentûˋes sur la figure prûˋcûˋdente.
#include <stdio.h>
#include <stdlib.h>
#include <pthread.h>
#include <semaphore.h>
sem_t evt; //dûˋclaration du sûˋmaphore reprûˋsentant l'ûˋvûˋnement de synchronisation
void* tache1(void *arg){
int i=0;
while(i<10){
printf("La tache %s s'execute\n", (char*) arg);
//suite du code
sem_post(&evt); //la tûÂche 1 ûˋmet l'ûˋvûˋnement û la fin de son exûˋcution
i++;
}
}
void* tache2(void *arg){
int i=0;
while(i<10){
sem_wait(&evt); //la tûÂche 2 est bloquûˋe en attente de l'ûˋmission de l'ûˋvûˋnement qui lui permettra de poursuivre
printf("La tache %s s'execute enfin\n", (char*) arg);
//suite du code
i++;
}
}
int main()
{
pthread_t th1, th2;
sem_init(&evt, 0, 2); // le sûˋmaphore est local au processus issu de la fonction main() et a un compteur initialisûˋ a 2
pthread_create(&th1, NULL, tache1, "1");
pthread_create(&th2, NULL, tache2, "2");
pthread_join(th1, NULL);
pthread_join(th2, NULL);
return 0;
}#$ gcc -lpthread -o synchronisation synchronisation.c
#$ ./synchronisation
La tache 1 s'execute
La tache 1 s'execute
La tache 1 s'execute
La tache 1 s'execute
La tache 1 s'execute
La tache 1 s'execute
La tache 1 s'execute
La tache 1 s'execute
La tache 1 s'execute
La tache 1 s'execute
La tache 2 s'execute enfin
La tache 2 s'execute enfin
La tache 2 s'execute enfin
La tache 2 s'execute enfin
La tache 2 s'execute enfin
La tache 2 s'execute enfin
La tache 2 s'execute enfin
La tache 2 s'execute enfin
La tache 2 s'execute enfin
La tache 2 s'execute enfinIX. Rûˋfûˋrences▲
Pour plus de dûˋtail sur la norme OSEK/VDX, vous pouvez consulter les sites suivants :
- Livre : Systû´mes temps rûˋel de contûÇle commande-commande - Conception et Implementation
- http://randu.org/tutorials/threads/
- http://www.cs.cmu.edu/afs/cs/academic/class/15492-f07/www/pthreads.html
- http://pubs.opengroup.org/onlinepubs/007908799/xsh/pthread.h.html
- http://www.cs.kent.edu/~ruttan/sysprog/lectures/multi-thread/multi-thread.html
- https://www.sourceware.org/pthreads-win32/
X. Remerciements▲
Je tiens û remercier Bktero, Gangsoleil et Neckara pour leurs relectures techniques de ce cours. Je remercie ûˋgalement Ced pour sa relecture orthographique.