





I. Qu'est-ce que OSEK/VDX ?▲
OSEK/VDX est une norme qui permet de dÃĐfinir les architectures et les interfaces destinÃĐes à la gestion des systÃĻmes embarquÃĐs dans l'automobile. Il a ÃĐtÃĐ crÃĐÃĐ en 1993 par un consortium de constructeurs automobiles allemands avant d'Être rejoint plus tard par les constructeurs français. Une architecture complÃĻte d'OSEK/VDX est composÃĐe de trois parties :
- OSEK COM, permet de gÃĐrer les aspects communication (ÃĐchange de messages dans et entre composants ÃĐlectroniques automobiles) du systÃĻme ;
- OSEK NM, permet de gÃĐrer le rÃĐseau permettant la communication dans le systÃĻme ;
- OSEK OS, permet de spÃĐcifier les services d'un systÃĻme d'exploitation temps rÃĐel pour la gestion des applications embarquÃĐes s'exÃĐcutant dans le systÃĻme. C'est cette derniÃĻre partie qui nous intÃĐresse dans ce cours.
OSEK OS est actuellement à sa version 2.2.3. C'est une norme qui dÃĐfinit les services d'un systÃĻme d'exploitation temps rÃĐel s'exÃĐcutant sur une architecture monoprocesseur. Contrairement à la norme POSIX par exemple (voir mon cours sur Posix), la norme OSEK/VDX est
destinÃĐe à la spÃĐcification des applications multitÃĒches utilisant des ressources limitÃĐes. Par exemple des applications multitÃĒches qui doivent s'exÃĐcuter sur une architecture à base de microcontrÃīleur. Pour OSEK/VDX, les moyens d'interaction
entre l'application multitÃĒche embarquÃĐe et le systÃĻme d'exploitation qui s'exÃĐcute sur le matÃĐriel, sont les services. C'est donc la standardisation de ces services dont il est question et que nous allons apprendre le long de ce cours.
De plus, notons que cette standardisation des services offre la relative facilitÃĐ de la portabilitÃĐ des applications dÃĐveloppÃĐes, d'une architecture matÃĐrielle à une autre.
Pour spÃĐcifier une application multitÃĒche embarquÃĐe, OSEK/VDX impose que sa dÃĐfinition soit statique et doit suivre la procÃĐdure suivante :
- La dÃĐfinition d'un fichier d'extension .oil, appelÃĐ fichier OIL (OSEK Implementation Language) dans lequel sera renseignÃĐ suivant une structuration bien dÃĐfinie, l'ensemble des diffÃĐrents objets utilisÃĐs par l'application. Ces objets sont dÃĐfinis au travers d'un langage ÃĐgalement appelÃĐ langage OIL ;
- Puis la dÃĐfinition d'un fichier programme (d'extension .c) qui implÃĐmente en langage C les objets dÃĐfinis dans le fichier OIL. Notons que OSEK/VDX est une norme qui s'associe au langage de programmation C.
Ces deux fichiers correspondent aux sources (programme) de l'application embarquÃĐe. Ils sont donc tous les deux utilisÃĐs par le compilateur lors de la phase de compilation pour gÃĐnÃĐrer l'exÃĐcutable de l'application destinÃĐe à l'architecture cible sur laquelle elle s'exÃĐcutera.
Les diffÃĐrents objets OSEK/VDX que peuvent utiliser une application et qui doivent Être dÃĐclarÃĐs dans le fichier OIL sont les suivants :
- l'ojet TASK : correspond à une tÃĒche de l'application ;
- l'objet RESOURCE : nÃĐcessaire pour la protection d'une ressource critique dans l'application ;
- l'objet APPMODE : permet de dÃĐfinir les diffÃĐrents modes de fonctionnement de l'application embarquÃĐe ;
- l'ojet EVENT : permet de gÃĐrer les ÃĐvÃĐnements pouvant survenir pendant l'exÃĐcution du systÃĻme. Il est aussi utilisÃĐ pour gÃĐrer la synchronisation entre tÃĒches ;
- l'objet COUNTER : il s'agit d'un compteur basÃĐ sur une horloge systÃĻme et qui permet de gÃĐrer les alarmes ;
- l'objet ALARM : il est basÃĐ sur l'objet COUNTER et permet de dÃĐclencher un ÃĐvÃĐnement (pÃĐriodiquement ou non) ou d'activer une tÃĒche (pÃĐriodiquement ou non) ;
- l'objet OS : permet de spÃĐcifier comment le systÃĻme d'exploitation OSEK/VDX qui s'exÃĐcute sur le CPU doit interagir avec l'application embarquÃĐe ;
- l'objet ISR : permet de gÃĐrer les routines de service d'interruption supportÃĐes par le systÃĻme d'exploitation ;
- l'objet MESSAGE : dÃĐfinit les moyens d'ÃĐchange de messages entre tÃĒches et/ou entre ISR ;
- l'objet CPU : c'est le conteneur de tous les objets citÃĐs ci-dessus.
Dans le paragraphe suivant, nous prÃĐsenterons ces diffÃĐrents objets. Nous montrerons comment ils sont dÃĐclarÃĐs dans le fichier OIL avec les diffÃĐrents attributs qui les dÃĐfinissent et par ailleurs, les services via lesquels ils sont appelÃĐs ou traitÃĐs dans le fichier programme C.
II. Les objets OSEK/VDX et leurs services▲
II-A. L'objet APPMODE▲
Nous commençons par dÃĐfinir l'objet APPMODE qui est le plus simple. Il est utilisÃĐ pour permettre au systÃĻme d'exploitation OSEK/VDX de fonctionner en mode application.
II-A-1. DÃĐclaration dans le fichier OIL▲
L'objet APPMODE ne dispose pas d'attribut et se dÃĐclare dans le fichier OIL de la façon suivante :
APPMODE nom_appmode
{
};Notons que lors de la spÃĐcification d'une application embarquÃĐe sur un processeur, au moins un objet APPMODE doit Être dÃĐfini.
II-B. L'objet TASK▲
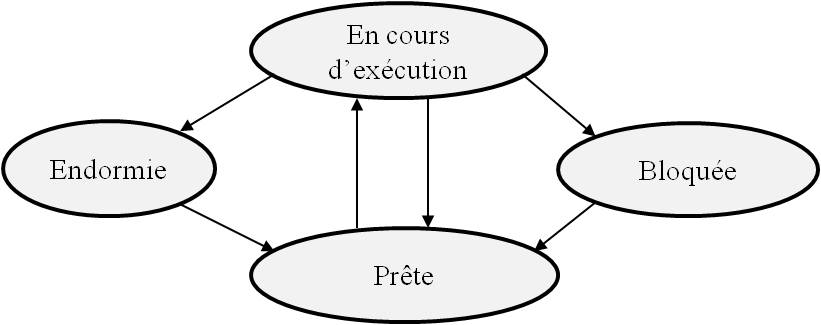
L'objet TASK correspond à une tÃĒche qui s'exÃĐcute dans l'application. La norme OSEK/VDX dÃĐfinit deux types de tÃĒches : les tÃĒches basiques et les tÃĒches ÃĐtendues. Une tÃĒche ÃĐtendue est l'ÃĐquivalent d'un processus dans le domaine des systÃĻmes d'exploitation. C'est-à -dire que pendant son exÃĐcution elle peut se retrouver dans quatre ÃĐtats possibles : bloquÃĐe, endormie, prÊte et en cours d'exÃĐcution.
|
Contrairement aux tÃĒches ÃĐtendues, les tÃĒches basiques ne disposent pas de l'ÃĐtat bloquÃĐ. C'est-Ã -dire que les tÃĒches basiques
ne peuvent pas disposer d'une section critique dans leurs codes sources. Ceci donne l'avantage que les tÃĒches basiques peuvent s'exÃĐcuter en utilisant une mÊme pile (optimisation des ressources), alors que chaque tÃĒche ÃĐtendue dispose de sa propre pile. C'est pourquoi pour faciliter la
correspondance entre une application que l'on veut dÃĐvelopper et les ressources dont doit disposer le systÃĻme d'exploitation pour permettre son exÃĐcution, la norme OSEK/VDX dÃĐfinit un certain nombre de classes de conformitÃĐ :
- La classe de conformitÃĐ BCC1 correspond aux applications embarquÃĐes supportant uniquement des tÃĒches basiques. Chaque tÃĒche est limitÃĐe à une demande d'activation et dispose d'une prioritÃĐ. Par ailleurs plusieurs tÃĒches ne peuvent pas avoir la mÊme prioritÃĐ.
- La classe de conformitÃĐ BCC2 est l'extension de la classe BCC1 avec la possibilitÃĐ d'activation multiple d'une tÃĒche et la possibilitÃĐ pour plusieurs tÃĒches d'avoir la mÊme prioritÃĐ.
- La classe de conformitÃĐ ECC1 correspond à la classe BCC1 mais pour des tÃĒches ÃĐtendues.
- Enfin, la classe de conformitÃĐ ECC2 est l'extension de la classe ECC1 avec la possibilitÃĐ pour plusieurs tÃĒches d'avoir la mÊme prioritÃĐ.
Pour plus d'information sur les classes de conformitÃĐ, vous pouvez vous rÃĐfÃĐrer ici.
Maintenant nous allons apprendre comment est dÃĐclarÃĐe une tÃĒche dans le langage OIL du fichier .oil.
II-B-1. DÃĐclaration dans le fichier OIL▲
Une tÃĒche OSEK/VDX se dÃĐclare de la façon :
TASK nom_tache
{
AUTOSTART = TRUE
PRIORITY = 1;
ACTIVATION = 1;
SCHEDULE = FULL;
STACKSIZE = 512;
};- l'attribut AUTOSTART indique si la tÃĒche est activÃĐe ou non au dÃĐmarrage de l'application. Il prend les valeurs TRUE ou FALSE ;
- l'attribut PRIORITY donne la prioritÃĐ de la tÃĒche oÃđ 1 correspond à la prioritÃĐ la plus basse du systÃĻme ;
- l'attribut ACTIVATION indique le nombre d'activations que la tÃĒche peut retenir à un moment donnÃĐ et les prendre en compte plus tard. Dans ce cas une seule activation ;
- l'attribut SCHEDULE indique le type d'ordonnancement de la tÃĒche. OSEK/VDX est basÃĐe sur un ordonnancement à prioritÃĐ fixe avec traitement FIFO pour les tÃĒches de mÊme prioritÃĐ. Les politiques d'ordonnancement possibles sont : FULL pour un ordonnancement avec prÃĐemption et NON sans prÃĐemption ;
- l'attribut STACKSIZE indique la taille en octets de la pile utilisÃĐe par la tÃĒche. Dans ce cas la tÃĒche a une pile de taille 512 octets ;
II-B-2. Utilisation dans le fichier C▲
Dans le fichier programme C, avant d'utiliser un objet TASK du fichier OIL, il faut le dÃĐclarer dans le fichier C. Pour cela, il faut appeler la fonction (ou service) suivante :
DeclareTask(nom_tache)
Cette fonction est gÃĐnÃĐralement appelÃĐe en tout dÃĐbut de programme directement aprÃĻs les lignes #include.
Puis la dÃĐfinition effective de la tÃĒche doit se prÃĐsenter de la façon suivante :
TASK(nom_tache)
{
//...
TerminateTask();
}Le corps de la tÃĒche s'ÃĐcrit à l'aide du langage C. En outre, une tÃĒche OSEK/VDX se termine toujours par le service TerminateTask() dont le prototype est le suivant :
StatusType TerminateTask(void)
Ce service (ou fonction si vous voulez) est obligatoire, car il permet de terminer l'instance de la tÃĒche en cours d'exÃĐcution. StatusType est un type de donnÃĐe globale du systÃĻme qui permet de savoir si le service qui vient
d'Être appelÃĐ a gÃĐnÃĐrÃĐ une erreur ou pas (c'est un peu l'ÃĐquivalent de la variable errno en C standard). Ceci est vrai pour plusieurs autres services.
Quelques fois, si une tÃĒche doit se terminer en activant une autre tÃĒche de l'application,
le service TerminateTask() est remplacÃĐ par le service chainTask(nom_tache_a_activer) dont le prototype est le suivant :
StatusType chainTask(nom_tache_a_activer)Il existe d'autres services qui peuvent Être appliquÃĐs aux tÃĒches. Leurs prototypes sont les suivants :
1. Le service permettant d'activer une tÃĒche dont l'identifiant nom_tache_a_activer est donnÃĐ en paramÃĻtre :
StatusType ActivateTask(nom_tache_a_activer)
2. Le service permettant de mettre dans la variable globale nom_tache du programme, le nom de la tÃĒche en cours d'exÃĐcution dans le systÃĻme. Ce service peut Être appelÃĐ par une tÃĒche de l'application ou une ISR (Interrupt Service Request) dÃĐfinie dans l'application :
StatusType GetTaskID(nom_tache)
3. Le service permettant de mettre dans la variable globale etat du programme, l'ÃĐtat (bloquÃĐ, endormie, en cours d'exÃĐcution ou prÊte) de la tÃĒche dont l'identifiant est nom_tache. Ce service peut Être appelÃĐ par une tÃĒche de l'application ou une ISR (Interrupt Service Request) dÃĐfinie dans l'application :
StatusType GetTaskState(nom_tache, etat)
4. Le service appelÃĐ par la tÃĒche en cours d'exÃĐcution pour s'endormir et lancer l'exÃĐcution de l'ÃĐventuelle tÃĒche la plus prioritaire qui attend dans l'ÃĐtat prÊt :
StatusType Schedule(void)II-C. L'objet Event▲
L'objet EVENT permet de synchroniser deux tÃĒches entre elles de façon à crÃĐer un ordre de prÃĐcÃĐdence de leurs exÃĐcutions. Un ÃĐvÃĐnement permet à une tÃĒche de passer dans l'ÃĐtat bloquÃĐ. Ãtant donnÃĐ que seules les tÃĒches ÃĐtendues peuvent se retrouver dans cet ÃĐtat, elles sont donc les seules à pouvoir utiliser l'objet EVENT. Une tÃĒche possÃĐdant l'objet EVENT est celle qui attend sur cet ÃĐvÃĐnement. Toute autre tÃĒche peut lui transmettre l'ÃĐvÃĐnement attendu pour la faire passer à l'ÃĐtat prÊt.
II-C-1. DÃĐclaration dans le fichier OIL▲
L'objet EVENT est dÃĐclarÃĐ dans le fichier OIL de la façon suivante:
EVENT un_evt
{
MASK = AUTO;
};
TASK nom_tache_a_declencher
{
//...
EVENT = un_evt;
};L'attribut MASK correspond à un entier de type UINT64 qui identifie de maniÃĻre unique l'ÃĐvÃĐnement dans le systÃĻme. Comme sur l'exemple prÃĐcÃĐdent, il peut Être initialisÃĐ par la valeur AUTO. Dans ce cas, c'est le systÃĻme qui se charge de lui affecter une valeur unique.
II-C-2. Utilisation dans le fichier C▲
Dans le fichier programme C, avant d'utiliser un objet EVENT du fichier OIL, il faut le dÃĐclarer dans le fichier C. Pour cela, il faut appeler la fonction (ou service) suivante :
DeclareEvent(un_evt)Plusieurs services sont offerts pour le traitement de l'objet EVENT. Ce sont :
1. Le service appelÃĐ dans le corps d'une tÃĒche ou d'une ISR quelconque pour lui permette de transmettre l'ÃĐvÃĐnement nommÃĐ un_evt à la tÃĒche nom_tache_a_declencher qui le possÃĻde :
StatusType SetEvent(nom_tache_a_declencher, un_evt)
2. Le service permettant à une tÃĒche (exemple, nom_tache_a_declencher) possÃĐdant l'ÃĐvÃĐnement un_evt d'attendre sur ce dernier :
StatusType WaitEvent(un_evt)
3. Le service permettant d'effacer l'attente sur un ÃĐvÃĐnement :
StatusType ClearEvent(un_evt)
4. Le service appelÃĐ dans le corps d'une tÃĒche ou d'une ISR quelconque pour rÃĐcupÃĐrer l'ÃĐtat courant de l'attribut MASK de l'ÃĐvÃĐnement un_evt que possÃĻde la tÃĒche nom_tache_a_declencher :
StatusType GetEvent(nom_tache_a_declencher, un_evt)
L'exemple ci-dessous montre la structuration de deux tÃĒches manipulant un ÃĐvÃĐnement :
TASK(nom_tache_declencheur_evt)
{
//...
SetEvent(nom_tache_a_declencher, un_evt);
TerminateTask();
}
TASK(nom_tache_a_declencher)
{
WaitEvent(un_evt);
//...
ClearEvent(un_evt) //effacer l'ÃĐvÃĐnement pour permettre sa rÃĐutilisation par la suite
TerminateTask();
}II-D. L'objet RESOURCE▲
L'objet RESOURCE permet de gÃĐrer les accÃĻs concurrents à des ressources partagÃĐes. Ces ressources peuvent Être une donnÃĐe (zone mÃĐmoire), un matÃĐriel (ex : pÃĐriphÃĐrique d'entrÃĐe/sortie), l'ordonnanceur du systÃĻme d'exploitation. Il permet ainsi de mettre en place une section critique dans le code d'une tÃĒche. Cet objet peut Être traitÃĐ par une tÃĒche ÃĐtendue ou un ISR.
II-D-1. DÃĐclaration dans le fichier OIL▲
L'objet RESOURCE est dÃĐclarÃĐ dans le fichier OIL de la façon suivante :
RESOURCE une_ressource
{
RESOURCEPROPERTY = STANDARD;
};
TASK nom_tache
{
//...
RESOURCE = une_ressource;
};
L'attribut RESOURCEPROPERTY correspond à une variable de type ENUM qui peut prendre les valeurs suivantes :
- STANDARD indique que la ressource est une ressource normale, c'est-à -dire non liÃĐe à une autre et n'est pas une ressource interne ;
- LINKED indique que la ressource est liÃĐe à une autre ressource de type STANDARD ou LINKED. Laquelle ressource doit disposer d'un attribut supplÃĐmentaire LINKEDRESOURCE de type RESOURCE_TYPE ;
- INTERNAL indique que la ressource est interne et ne peut donc Être accessible par l'application.
II-D-2. Utilisation dans le fichier C▲
Dans le fichier programme C, avant d'utiliser un objet RESOURCE du fichier OIL, il faut le dÃĐclarer dans le fichier C. Pour cela, il faut appeler la fonction (ou service) suivante :
DeclareResource(une_ressource)Plusieurs services sont offerts pour le traitement de l'objet RESOURCE. Ce sont :
1. Le service appelÃĐ dans le corps d'une tÃĒche ou d'une ISR quelconque pour entrer dans la section critique dans l'objet une_ressource permet de mettre en place l'exclusion mutuelle :
StatusType GetResource(une_ressource)
2. Le service permettant à une tÃĒche ou à une ISR de sortir de la section critique :
StatusType ReleaseResource(une_ressource)
L'exemple ci-dessous montre la mise en place dans le fichier C d'une exclusion mutuelle pour protÃĐger une donnÃĐe partagÃĐe dans le corps de la tÃĒche nom_tache :
typedef struct{
float temperature ;
float pression ;
}type_donnee_partagee ;
type_donnee_partagee donnee_partagee; //variable globale dans le programme
TASK(nom_tache)
{
//...
GetResource(une_ressource);
//section critique : utilisation de donnee_partagee
ReleaseResource(une_ressource);
//...
TerminateTask();
}II-E. L'objet ISR▲
L'objet ISR reprÃĐsente les routines de traitement d'interruption. Il permet de traiter les interruptions qui surviennent dans le systÃĻme.
Ces interruptions peuvent provenir d'un signal apparaissant sur une entrÃĐe du microcontrÃīleur, d'un port rÃĐseau ou sÃĐrie, de l'expiration d'un
compteur qui dÃĐclenche une action, etc.
Il existe deux types d'ISR : les ISR de type 1 et les ISR de type 2. Les ISR de type 1 ne font pas appel aux services du systÃĻme d'exploitation, car
elles s'exÃĐcutent dans la pile de la tÃĒche qu'elle prÃĐempte. Les ISR de type 2 disposent chacune de leur propre pile et peuvent donc faire appel aux
services du systÃĻme.
II-E-1. DÃĐclaration dans le fichier OIL▲
L'objet ISR est dÃĐclarÃĐ dans le fichier OIL de la façon suivante :
ISR traiteur_interruptions
{
CATEGORY = 2;
PRIORITY = 7;
//...
};L'attribut CATEGORY dÃĐfinit la catÃĐgorie de l'ISR. Il correspond à une variable de type UINT32 qui ne peut prendre que les valeurs 1 et 2. L'attribut PRIORITY est un entier qui indique la prioritÃĐ (1 ÃĐtant la plus petite) de l'ISR parmi les ISR dÃĐfinies dans l'application. Par ailleurs, une ISR peut utiliser d'autres objets tels que des RESOURCE, EVENT, MESSAGE, etc. Pour cela, ils doivent Être dÃĐclarÃĐs à l'intÃĐrieur de ce dernier.
II-E-2. Utilisation dans le fichier C▲
Dans le fichier programme C, une ISR est dÃĐclarÃĐe de la façon suivante :
ISR(traiteur_interruptions)
{
//..
}Plusieurs services sont offerts pour la gestion des ISR dans le systÃĻme. Ce sont :
1. Le service appelÃĐ pour dÃĐsactiver les interruptions masquables du systÃĻme :
void DisableAllInterrupts(void)
2. Le service permettant de rÃĐactiver les interruptions dÃĐsactivÃĐes par le service DisableAllInterrupts :
void EnableAllInterrupts(void)
3. Le service appelÃĐ pour dÃĐsactiver les ISR de type 2 :
void SuspendOSInterrupts(void)
4. Le service permettant de rÃĐactiver les interruptions de type 2 mais aussi de type 1 :
void ResumeOSInterrupts(void)Notons ÃĐgalement qu'il existe aussi deux autres services que sont : SuspendAllInterrupts et ResumeAllInterrupts.
II-F. L'objet COUNTER▲
L'objet COUNTER sert de base à l'objet ALARM (que nous verrons par la suite). Il permet comme son nom l'indique de crÃĐer un dÃĐcompte dans le but de dÃĐclencher une alarme. L'essentiel de sa dÃĐfinition est effectuÃĐ dans le fichier OIL.
II-F-1. DÃĐclaration dans le fichier OIL▲
L'objet COUNTER est dÃĐclarÃĐ dans le fichier OIL de la façon suivante :
COUNTER nom_compteur
{
MINCYCLE = 1;
MAXALLOWEDVALUE = 500000;
TICKSPERBASE = 1;
};- L'attribut MINCYCLE de type UINT32, il permet de dÃĐfinir le nombre minimum de ticks (unitÃĐ de temps de base de l'OS OSEK/VDX) obligatoire pour une alarme qui y est reliÃĐe ;
- L'attribut MAXALLOWEDVALUE, de type UINT32, il dÃĐfinit la valeur maximale du compteur ;
- L'attribut TICKSPERBASE de type UINT32, il dÃĐfinit le nombre de ticks d'horloge entre chaque comptage (dans l'exemple, on compte avec un pas de 1).
II-F-2. Utilisation dans le fichier C▲
L'utilisation de l'objet COUNTER dans le fichier programme C est simple et ne nÃĐcessite que la fonction suivante :
DeclareCounter(nom_compteur)II-G. L'objet ALARM▲
L'objet ALARM est un outil qui peut Être utilisÃĐ dans l'application pour activer une tÃĒche de façon ponctuelle ou pÃĐriodique. Il utilise un compteur qui est un objet de type COUNTER. Une alarme ne peut utiliser qu'un seul compteur. Mais un compteur peut Être utilisÃĐ par plusieurs alarmes.
II-G-1. DÃĐclaration dans le fichier OIL▲
L'objet ALARM est dÃĐclarÃĐ dans le fichier OIL de la façon suivante :
ALARM nom_alarme
{
COUNTER = nom_compteur; //le compteur doit avoir ÃĐtÃĐ dÃĐfini
ACTION = ACTIVATETASK
{
TASK = nom_tache; //la tÃĒche doit avoir ÃĐtÃĐ dÃĐfinie
};
AUTOSTART = TRUE
{
ALARMTIME = 5;
CYCLETIME = 9;
APPMODE = appmode1;
};
};
Trois attributs sont importants à sa dÃĐfinition : COUNTER, ACTION et AUTOSTART.
- L'attribut COUNTER pour indiquer le compteur utilisÃĐ par l'alarme.
- L'attribut ACTION peut Être utilisÃĐ pour rÃĐaliser trois opÃĐrations : la simple activation d'une tÃĒche comme sur
l'exemple prÃĐcÃĐdent ; le dÃĐclenchement d'une tÃĒche via la transmission d'un ÃĐvÃĐnement sur lequel elle attend. Dans ce cas,
le code prÃĐcÃĐdent traitant de l'action de l'alarme est remplacÃĐ par le suivant :
ACTION = SETEVENT
{
TASK = nom_tache; //la tÃĒche qui attend sur l'ÃĐvÃĐnement. Doit dÃĐjà Être dÃĐfinie
EVENT = un_evt; //l'ÃĐvÃĐnement à transmettre. Doit dÃĐjà Être dÃĐfini
};
L'attribut ACTION permet aussi d'appeler une routine de type alarm-callback. Nous n'entrons pas en dÃĐtail pour ce cas.
- L'attribut AUTOSTART de type boolean permet de dÃĐfinir si l'alarme s'active ou non automatiquement au dÃĐmarrage du systÃĻme.
Il prend donc les valeurs TRUE ou FALSE. Lorsque sa valeur est TRUE, il faut spÃĐcifier les paramÃĻtres suivants :
- ALARMTIME de type UINT32 qui reprÃĐsente la date au bout de laquelle l'alarme expirera pour la toute premiÃĻre fois ;
- CYCLETIME de type UINT32 qui reprÃĐsente la pÃĐriode de l'alarme si elle est cyclique (cas de l'exemple : 5 + 9; (5 + 9) + 9; ...) ;
- APPMOD la liste des modes dans lesquels le dÃĐmarrage de l'alarme doit Être effectuÃĐ.
II-G-2. Utilisation dans le fichier C▲
Dans le fichier programme C, un objet ALARM est prÃĐalablement dÃĐclarÃĐ avant toute utilisation via la fonction suivante :
DeclareAlarm(nom_alarme)Plusieurs services sont offerts pour la gestion des ALARM dans le systÃĻme. Ce sont :
1. Le service appelÃĐ pour mettre dans la variable info les informations sur l'alarme nommÃĐe nom_alarm :
StatusType GetAlarmBase(nom_alarme, info)
2. Le service appelÃĐ pour mettre dans la variable nombre_ticks_restant le nombre de ticks restants avant l'expiration de l'alarme nommÃĐe nom_alarm :
StatusType GetAlarm(nom_alarme, nombre_ticks_restant)
3. Le service permettant de configurer l'alarme nommÃĐe nom_alarme pour qu'elle expire au bout d'un certaine temps. La variable nombre_ticks correspond à son nombre relatif
de ticks pour faire un cycle. Si l'alarme est cyclique/pÃĐriodique, alors sa pÃĐriode est indiquÃĐe dans la variable temps_cycle. Cette derniÃĻre vaut zÃĐro si l'alarme n'est pas cyclique :
StatusType GetAlarm(nom_alarme, nombre_ticks, temps_cycle)
4. Le service permettant de configurer l'alarme nommÃĐe nom_alarme pour qu'elle expire à une date donnÃĐe. La variable nombre_ticks correspond à son nombre absolu
de ticks pour faire un cycle. Si l'alarme est cyclique/pÃĐriodique, alors sa pÃĐriode est indiquÃĐe dans la variable temps_cycle. Cette derniÃĻre vaut zÃĐro si l'alarme n'est pas cyclique :
StatusType GetAlarm(nom_alarme, nombre_ticks, temps_cycle)II-H. L'objet OS▲
L'objet OS est utilisÃĐ pour dÃĐfinir les propriÃĐtÃĐs que le systÃĻme d'exploitation OSEK/VDX doit mettre à disposition de l'application embarquÃĐe.
II-H-1. DÃĐclaration dans le fichier OIL▲
Un exemple de dÃĐclaration de l'objet OS dans le fichier OIL est la suivante :
OS nom_OS
{
STATUS = EXTENDED;
STARTUPHOOK = FALSE;
ERRORHOOK = FALSE;
SHUTDOWNHOOK = FALSE;
PRETASKHOOK = FALSE;
POSTTASKHOOK = FALSE;
USEGETSERVICEID = FALSE;
USEPARAMETERACCESS = FALSE;
USERESSCHEDULER = FALSE;
};Comme vous l'avez constatÃĐ, tous les attributs dÃĐfinis dans l'objet OS sont de type boolÃĐen à l'exception de l'attribut STATUS.
- STATUS de type ENUM, il permet de spÃĐcifier le mode de fonctionnement du systÃĻme (standard ou ÃĐtendu). Il prend les valeurs STANDARD ou EXTENDED ;
- STARTUPHOOK, permet de spÃĐcifier si l'application se lance exactement à la fin de l'initialisation du systÃĻme d'exploitation et avant le dÃĐbut d'exÃĐcution de l'ordonnanceur ;
- ERRORHOOK, permet de spÃĐcifier si le systÃĻme d'exploitation prend la main à la fin de l'exÃĐcution de tout service pour savoir s'il s'est bien exÃĐcutÃĐ ou pas ;
- SHUTDOWNHOOK, permet de spÃĐcifier si le systÃĻme d'exploitation s'arrÊte à la fin de l'application ;
- PRETASKHOOK, traite du changement de contexte des tÃĒches. Il permet de spÃĐcifier si le systÃĻme d'exploitation prend la main juste avant que le processeur soit donnÃĐ Ã une tÃĒche, pour contrÃīler son ÃĐtat ;
- POSTTASKHOOK, traite du changement de contexte des tÃĒches. Il permet de spÃĐcifier si le systÃĻme d'exploitation prend la main juste aprÃĻs que le processeur soit retirÃĐ Ã la tÃĒche en cours d'exÃĐcution, pour contrÃīler son ÃĐtat ;
- USEGETSERVICEID et USEPARAMETERACCESS, sont liÃĐs à ERRORHOOK. Ils permettent de spÃĐcifier si l'on autorise l'accÃĻs à certaines informations ;
- USERESSCHEDULER, permet de spÃĐcifier si la ressource RES_SCHEDULER (l'ordonnanceur du systÃĻme d'exploitation) est utilisÃĐe par l'application comme une ressource ordinaire.
II-I. L'objet CPU▲
L'objet CPU est utilisÃĐ comme conteneur de tous les autres objets dÃĐfinis plus haut : APPMODE, TASK, OS, COUNTER, ALARM, RESOURCE, COUNTER, MESSAGE.
II-I-1. DÃĐclaration dans le fichier OIL▲
La dÃĐclaration de l'objet CPU dans le fichier OIL est la suivante :
CPU nom_du_cpu
{
//ici la description OIL de tous les objets OSEK/VDX dont utilise
//l'application embarquÃĐe
};III. Exemple applicatif : robot Lego NXT▲
III-A. Robot Lego NXT ?▲
Le robot Lego NXT est un outil acadÃĐmique multifonctions programmable sur lequel s'exÃĐcute le systÃĻme d'exploitation nxtOSEK conforme à OSEK/VDX. L'exemple d'un Robot Lego NXT est donnÃĐ par la figure ci-dessous :

|
Il est obtenu par assemblage d'un ensemble de briques de base en fonction du type d'opÃĐration à rÃĐaliser par l'application qui lui est embarquÃĐe. Les robots Lego NXT sont munis d'un microcontrÃīleur ARM7 32 bits, de trois servo-moteurs, de quatre ports d'entrÃĐe (numÃĐrotÃĐs de 1 à 4) pour la connexion de diffÃĐrents capteurs, de trois ports de sortie (numÃĐrotÃĐs de A à C) pour la commande des servomoteurs, d'un port USB 2.0, des fonctionnalitÃĐs Bluetooth, etc. Les diffÃĐrents capteurs qui peuvent lui Être connectÃĐs sont par exemple un capteur à ultrasons, un capteur de contact, un capteur lumineux, un capteur sonore, etc. Enfin, le robot NXT dispose d'une API (Application Programmable Interface) qui doit Être associÃĐe à du code C pour la programmation de l'ensemble de ses diffÃĐrents composants (capteurs, servomoteurs...). Cette API est consultable sur le lien suivant http://lejos-osek.sourceforge.net/ecrobot_c_api_frame.htmAPI pour le robot NXT.
III-B. Plate-forme de dÃĐveloppement croisÃĐ▲
III-B-1. Installation des outils de base▲
Il est possible de dÃĐvelopper un programme embarquÃĐ conforme à OSEK/VDX, tant sur Linux que sur Windows. Nous nous focalisons ici sur le cas de Windows. La mise en place de la plateforme de dÃĐveloppement OSEK/VDX sur Windows nÃĐcessite trois technologies :
- Cygwin : c'est un outil qui permet d'ÃĐmuler certaines fonctionnalitÃĐs de Linux sur le systÃĻme d'exploitation Windows ;
- GNU ARM : c'est une distribution du compilateur GCC (GNU Compiler Collection) permettant de compiler du code destinÃĐ Ã s'exÃĐcuter sur des microcontrÃīleurs de type ARM. Il supporte ainsi le microcontrÃīleur ARM7 dont dispose le robot Lego NXT ;
- nxtOSEK : c'est le systÃĻme d'exploitation conforme à OSEK/VDX s'exÃĐcutant sur le robot Lego NXT et qui est nÃĐcessaire dans la phase de compilation du code sur la machine hÃīte de dÃĐveloppement.
La procÃĐdure d'installation de la plateforme de dÃĐveloppement de programmes basÃĐs sur OSEK/VDX sur Windows est dÃĐcrite sur le lien suivant : http://lejos-osek.sourceforge.net/installation_windows.htm.installation de nxtOSEK sur windows
Nous rÃĐsumons ici en français cette procÃĐdure d'installation :
- TÃĐlÃĐchargez la derniÃĻre version de Cygwin iciTÃĐlÃĐchargez Cygwin et installez le (par exemple dans le rÃĐpertoire C:\cygwin). Pendant la phase d'installation de Cygwin, en vous servant des captures d'ÃĐcran prÃĐsentÃĐes dans le lien d'installation d'origine, choisissez la version la plus rÃĐcente de make (version supÃĐrieure ou ÃĐgale à la 3.8) ainsi que les bibliothÃĻques libintl1 à libintl8 et libncurves7 à libncurves10 ;
- TÃĐlÃĐchargez la derniÃĻre version de l'installateur (le .exe) de GNUARM ici et installez-le (par exemple dans le rÃĐpertoire C:\GNUARM). Pendant la phase d'installation de GNUARM, en vous servant des captures d'ÃĐcran prÃĐsentÃĐes dans le lien d'installation d'origine, dÃĐcochez l'installation de FPU (Floating Point Unit) et Big Endian, car le processeur ARM7 du robot Lego n'en a pas besoin. Dans la fenÊtre suivante, GNUARM vous proposera d'installer une nouvelle fois Cygwin, dÃĐcochez cette case, car vous l'avez dÃĐjà installÃĐ ;
- TÃĐlÃĐchargez iciTÃĐlÃĐchargez les pilotes du robot Lego NXT le fichier compressÃĐ permettant d'installer sur votre machine les pilotes du robot Lego NXT. Ces pilotes sont nÃĐcessaires dans la phase de compilation sur votre machine. DÃĐzippez-le dans un rÃĐpertoire de votre choix (sur ma machine, je l'ai fait dans E:\OSEK). Puis vous rendre dans le rÃĐpertoire suivant E:\OSEK\NXT Fantom Drivers\Windows\1.2\1.2.0\Products. En fonction que votre machine est une 32 ou une 64 bits, choisissez le bon setup d'installation des pilotes dans ce rÃĐpertoire et exÃĐcutez le ;
- Lorsque le codage de votre application sera terminÃĐ sur votre machine de dÃĐveloppement, vous aurez besoin de le flasher sur le robot pour qu'il puisse l'exÃĐcuter. C'est l'outil NXTTool qui gÃĻre cette opÃĐration de transfert de code vers le robot. TÃĐlÃĐchargez iciTÃĐlÃĐchargez NXTTool le fichier compressÃĐ de NXTTool et dÃĐzippez-le dans le rÃĐpertoire d'installation de Cygwin (exemple C:\cygwin\nxttool) ;
- Pour que NXTTool fonctionne correctement, il a besoin du firmware NXT. TÃĐlÃĐchargez iciTÃĐlÃĐchargez le firmware NXT le fichier compressÃĐ du firmware NXT. DÃĐzippez-le dans un rÃĐpertoire de votre choix et copiez son contenu (constituÃĐ des fichiers d'extension .rfw) dans le rÃĐpertoire d'installation de NXTTool (exemple C:\cygwin\nxttool) ;
- Il reste maintenant à installer nxtOSEK. TÃĐlÃĐchargez iciTÃĐlechargez nxtOSEK le fichier compressÃĐ d'nxtOSEK et dÃĐzippez-le dans le rÃĐpertoire d'installation de Cygwin (exemple C:\cygwin\nxtOSEK). Dans les derniÃĻres versions de nxtOSEK (par exemple le nxtOSEK 2.18), les auteurs ont dÃĐcidÃĐ de ne plus le livrer avec le fichier exÃĐcutable sg.exe qui doit normalement se situer dans le rÃĐpertoire \nxtOSEK\toppers_osek\sg. Cet exÃĐcutable joue un rÃīle important, car il permet de parser et de gÃĐnÃĐrer le code cible destinÃĐ au robot. Pour rajouter sg.exe dans le rÃĐpertoire d'installation de nxtOSEK (C:\nxtOSEK\toppers_osek\sg) sur votre machine, tÃĐlÃĐchargez le fichier compressÃĐ osek_os-1.1.lzh ici. DÃĐzippez le dans un rÃĐpertoire de votre choix, copiez le fichier sg.exe et collez le dans votre rÃĐpertoire C:\nxtOSEK\toppers_osek\sg.
- Pour flasher effectivement votre code sur le robot NXT, vous aurez besoin d'un cÃĒble USB Ã brancher entre votre machine et le robot. Pour faire que votre machine puisse reconnaÃŪtre le robot NXT (Ã l'autre bout du cÃĒble USB) comme un pÃĐriphÃĐrique externe (un peu comme une clÃĐ USB), vous devez installer l'outil libusb dont le setup se trouve dans le rÃĐpertoire d'installation de nxtOSEK (exemple : C:\cygwin\nxtOSEK\lejos_nxj\3rdparty\lib).
Les opÃĐrations ci-dessus vous ont permis d'installer tous les logiciels qu'il faut pour compiler vos programmes et pouvoir les flasher sur le robot, mais ce n'est pas terminÃĐ. Pour que tout fonctionne correctement, rendez-vous dans le dossier ecrobot (situÃĐ dans le rÃĐpertoire C:\cygwin\nxtOSEK), ouvrez (par exemple avec notePad++) le fichier tool_gcc.mak et renseignez les chemins d'installation de GNUARM et NXTTool, respectivement dans les variables GNUARM_ROOT et NXTTOOL_ROOT (exemple : GNUARM_ROOT=C:/GNUARM et NXTTOOL_ROOT=C:/cygwin/nexttool). Ces rÃĐpertoires sont nÃĐcessaires pendant la phase de compilation.
Dans le dossier sample_c appartenant au rÃĐpertoire d'installation de nxtOSEK (C:\cygwin\nxtOSEK\sample_c), il existe plusieurs programmes exemples que vous pouvez compiler pour tester votre installation complÃĻte de la plateforme. Si vous choisissez le
programme helloworld par exemple, dÃĐmarrez le terminal de Cygwin. Dans ce terminal, saisissez la commande cd C:/cygwin/nxtOSEK/samples_c/helloworld pour vous dÃĐplacer dans le rÃĐpertoire helloworld. Puis saisissez la commande make all pour compiler le programme exemple helloworld. Si la compilation se dÃĐroule bien, c'est que votre installation de la plateforme de dÃĐveloppement OSEK/VDX s'est bien passÃĐe. Vous pouvez ainsi commencer le codage de vos propres programmes embarquÃĐs.
III-B-2. DÃĐveloppement avec Eclipse▲
AprÃĻs avoir installÃĐ toute la plateforme de dÃĐveloppement ci-dessus, vous pouvez coder vos applications via un EDI (Environnement de DÃĐveloppement IntÃĐgrÃĐ) tel que Eclipse CDT. Avec Eclipse : vous bÃĐnÃĐficiez de la coloration de code qui vous aidera à rapidement dÃĐtecter des erreurs ; vous disposez de la possibilitÃĐ de compiler et de dÃĐboguer votre code en un clic, ce qui vous affranchit des commandes à connaÃŪtre et à saisir dans le terminal de Cygwin pour effectuer le mÊme traitement ; vous disposez enfin de la possibilitÃĐ de configurer le flashage de votre code sur le robot afin de rendre ce processus beaucoup plus simple que les commandes à saisir dans le terminal de Cygwin. Le lien suivant http://lejos-osek.sourceforge.net/eclipse.htm vous dÃĐcrit la procÃĐdure à suivre pour l'installation d'Eclipse CDT et sa configuration. Cette procÃĐdure d'installation et de configuration d'Eclipse CDT est simple et nous ne la redÃĐcrivons pas ici. Par contre, l'ÃĐtape 1 peut Être omise dans cette procÃĐdure si vous tÃĐlÃĐchargez directement Eclipse dÃĐdiÃĐ au dÃĐveloppement C/C++ nommÃĐ Eclipse IDE for C/C++ DevelopersTÃĐlÃĐchargez Eclipse pour le C/C++.
III-C. Exemple d'application▲
Pour mettre en pratique les notions vues prÃĐcÃĐdemment, nous allons dÃĐvelopper dans cette partie, une petite application embarquÃĐe. Le sujet est le suivant :
Programmation d'un robot Lego qui roule librement et qui freine et change de direction lorsqu'il dÃĐtecte un obstacle à une distance infÃĐrieure à 20cm devant lui.
Pour rÃĐsoudre ce problÃĻme, nous considÃĐrons que le robot dispose : de deux roues qui lui permettent de se dÃĐplacer ; d'un capteur à ultrasons qui lui permet de dÃĐtecter les
ÃĐventuels obstacles sur son chemin. L'application doit alors disposer de :
- deux tÃĒches : la tÃĒche acquerir_ultrason qui permet de rÃĐcupÃĐrer de maniÃĻre rÃĐguliÃĻre la distance entre le robot et un ÃĐventuel obstacle ; et la tÃĒche rouler qui permet au robot de se dÃĐplacer en essayant d'ÃĐviter les obstacles ;
- une donnÃĐe partagÃĐe entre les deux tÃĒches et devant contenir l'information (fournie par acquerir_ultrason) selon laquelle il y a un obstacle ou pas devant le robot. La tÃĒche rouler doit donc rÃĐguliÃĻrement scruter cette donnÃĐe afin de savoir l'action à rÃĐaliser (continuer de rouler ou freiner pour tourner et rouler).

|
III-C-1. Fichier OIL de l'application▲
Ãtant donnÃĐ que l'application est composÃĐe de deux tÃĒches, il faut bien entendu les dÃĐclarer dans le fichier OIL. Ces derniÃĻres accÃĻdent à une mÊme donnÃĐe. Un accÃĻs en exclusion mutuelle est alors nÃĐcessaire pour garder sa cohÃĐrence, d'oÃđ le besoin de l'objet RESOURCE. De mÊme les tÃĒches acquerir_ultrason et rouler doivent se rÃĐveiller de maniÃĻre pÃĐriodique pour respectivement ÃĐcrire et lire la
donnÃĐe informant de la prÃĐsence d'un obstacle ou non. D'oÃđ le besoin des objets COUNTER et ALARM pour rÃĐaliser la pÃĐriodicitÃĐ. Notons qu'au dÃĐmarrage de l'application, c'est l'alarme qui doit dÃĐclencher les tÃĒches.
Le fichier OIL de l'application est le suivant :
#include "implementation.oil"
CPU ATMEL_AT91SAM7S256
{
OS LEJOS_OSEK
{
STATUS = EXTENDED;
STARTUPHOOK = FALSE;
ERRORHOOK = FALSE;
SHUTDOWNHOOK = FALSE;
PRETASKHOOK = FALSE;
POSTTASKHOOK = FALSE;
USEGETSERVICEID = FALSE;
USEPARAMETERACCESS = FALSE;
USERESSCHEDULER = FALSE;
};
// DÃĐfinition du mode de l'application
APPMODE appmode1{};
// DÃĐfinition de la tÃĒche acquerir_ultrason
TASK acquerir_ultrason
{
AUTOSTART = FALSE;
PRIORITY = 2;
ACTIVATION = 1;
SCHEDULE = FULL;
STACKSIZE = 512;
RESOURCE = obstacle;
};
// DÃĐfinition de la tÃĒche rouler
TASK rouler
{
AUTOSTART = FALSE;
PRIORITY = 1;
ACTIVATION = 1;
SCHEDULE = FULL;
STACKSIZE = 512;
RESOURCE = obstacle;
};
// DÃĐfinition de la ressource pour l'exclusion mutuelle
RESOURCE obstacle
{
RESOURCEPROPERTY = STANDARD;
};
// DÃĐfinition du compteur utilisÃĐ par l'alarme
COUNTER compteur
{
MINCYCLE = 1;
MAXALLOWEDVALUE = 100000;
TICKSPERBASE = 1;
};
// DÃĐfinition de l'alarme pÃĐriodique utilisÃĐe pour rÃĐveiller la tÃĒche acquerir_ultrason
ALARM alarme_reveil_acquerirUltrason
{
COUNTER = compteur;
ACTION = ACTIVATETASK
{
TASK = acquerir_ultrason;
};
AUTOSTART = TRUE
{
ALARMTIME = 10;
CYCLETIME = 10;
APPMODE = appmode1;
};
};
// DÃĐfinition de l'alarme pÃĐriodique utilisÃĐe pour rÃĐveiller la tÃĒche rouler
ALARM alarme_reveil_rouler
{
COUNTER = compteur;
ACTION = ACTIVATETASK
{
TASK = rouler;
};
AUTOSTART = TRUE
{
ALARMTIME = 10;
CYCLETIME = 10;
APPMODE = appmode1;
};
};
};III-C-2. Fichier C de l'application▲
Ci-dessous le code C de l'application. Il est important de se rÃĐfÃĐrer à l'API du robot NXT pour comprendre certaines fonctions utilisÃĐes dans le programme.
#include "kernel.h"
#include "kernel_id.h"
#include "ecrobot_interface.h"
DeclareResource(obstacle);
DeclareTask(acquerir_ultrason);
DeclareTask(rouler);
DeclareCounter(compteur);
DeclareAlarm(alarme_reveil_acquerirUltrason);
DeclareAlarm(alarme_reveil_rouler);
//structure de donnÃĐe informant de l'existence ou non d'un obstacle
typedef struct{
int obstacleEnVue; // vaut 1 si obstacle et 0 sinon
}type_Obstacle;
//routine de traitement d'interruption nxtOSEK de type 2,
//elle est fournie par l'API du robot et doit figurer dans
//la liste des fonctions du programme
void user_1ms_isr_type2(void){
StatusType ercd;
// Increment System Timer Count
ercd = SignalCounter(compteur);
if(ercd != E_OK){
ShutdownOS(ercd);
}
}
//fonction d'initialisation des pilotes de matÃĐriels utilisÃĐs par le robot
//dans l'application. Elle est fournie par l'API du robot et doit obligatoirement
//figurer dans la liste des fonctions du programme
void ecrobot_device_initialize(void){
// Initialize ECRobot used devices
ecrobot_init_sonar_sensor(NXT_PORT_S1);
}
//dÃĐclaration de la variable globale partagÃĐe par les deux tÃĒches
type_Obstacle donneeObstacle;
//corps de la tÃĒche acquerir_ultrason
TASK(acquerir_ultrason){
int distance = ecrobot_get_sonar_sensor(NXT_PORT_S1);
GetResource(obstacle);
if(distance > 20){
donneeObstacle.obstacleEnVue = 0;
}else{
donneeObstacle.obstacleEnVue = 1;
}
ReleaseResource(obstacle);
TerminateTask();
}
//corps de la tÃĒche rouler
TASK(rouler){
int vitesseDeplacementRobot = 70;
int angleRotationRobot = 45;
int obs = 0;
GetResource(obstacle);
obs = donneeObstacle.obstacleEnVue;
ReleaseResource(obstacle);
if(obs == 0){
//commander les deux roues du robot à rouler :
nxt_motor_set_speed(NXT_PORT_A, vitesseDeplacementRobot, 0);
nxt_motor_set_speed(NXT_PORT_B, vitesseDeplacementRobot, 0);
}else{
//commander les roues du robot à tourner :
nxt_motor_set_speed(NXT_PORT_A, vitesseDeplacementRobot - 30, 1); //freiner en rÃĐduisant de 30 la vitesse de la 1ÃĻre roue du robot
nxt_motor_set_speed(NXT_PORT_B, -40, 1); //freiner en essayant d'imobiliser (vitesse nÃĐgative) la 2ÃĻme roue, pour permettre au robot de pivoter
nxt_motor_set_count(NXT_PORT_A, angleRotationRobot);
}
TerminateTask();
}IV. RÃĐfÃĐrences▲
Pour plus de dÃĐtail sur la norme OSEK/VDX, vous pouvez consulter les sites suivants :
V. Remerciements▲
Je tiens à remercier LittleWhite pour sa relecture technique de cet article. Un grand merci à f-leb pour sa minutieuse relecture orthographique.